6 - 下周的光追 Part3
开始学习大名鼎鼎的光追三部曲系列中的:Ray Tracing: The Next Week!希望我能坚持下去吧。
四边形
接下来我们将往项目中添加四边形图元。
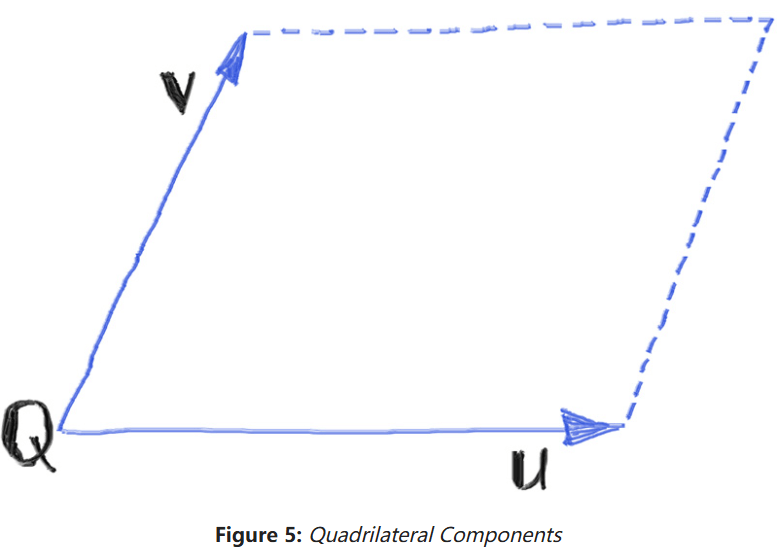
定义四边形
接下来看看四边形的定义,我们将用三个几何量去定义一个四边形:
:四边形的一角。 :代表一侧的向量。可通过 得到和 相邻的一角。 :代表另一侧的向量。可通过 得到和 相邻的另一角。
和
四边形是平的,因此它 AABB 的厚度为 0(在 XY/YZ/ZX 平面上)。在光线求交计算时可能会出现数值问题,我们可以通过设置一个极小的厚度来避免这种情况。修改 AABB 类如下:
class AABB { public: ... // 创建一个区间分量为x, y, z的AABB AABB(const Interval& x, const Interval& y, const Interval& z) : x(x), y(y), z(z) { pad_to_minimums(); } // 用两个点创建一个AABB AABB(const Point3& a, const Point3& b) { ... pad_to_minimums(); } // 用三个点创建一个AABB AABB(const Point3& a, const Point3& b, const Point3& c) { ... pad_to_minimums(); } ... private: // 给包围盒设置极小的厚度 void pad_to_minimums() { double delta = 0.0001; if (x.size() < delta) x = x.expand(delta); if (y.size() < delta) y = y.expand(delta); if (z.size() < delta) z = z.expand(delta); } };
准备好 AABB 后,就能编写四边形类 Quad 了:
class Quad : public Hittable { public: Quad(const Point3& Q, const Vec3& u, const Vec3& v, shared_ptr<Material> material) : Q(Q), u(u), v(v), material(material) { set_bounding_box(); } // 为四个顶点计算包围盒 virtual void set_bounding_box() { AABB bbox_diagonal1 = AABB(Q, Q + u + v); AABB bbox_diagonal2 = AABB(Q + u, Q + v); bbox = AABB(bbox_diagonal1, bbox_diagonal2); } bool hit(const Ray& r, Interval ray_t, HitRecord& rec) const override { // todo return false; } private: Point3 Q; Vec3 u, v; shared_ptr<Material> material; AABB bbox; };
光线与四边形求交
光线与四边形求交需要经历三个步骤:
- 找到包含四边形的平面;
- 光线和四边形所在平面的求交;
- 查看交点是否在四边形内部。
我们先看看第二步,光线和平面的求交。类似光线和球面相交,这里给出平面的定义:
判断光线和平面求交的方法同样适用于其他平面图元,如三角形,圆盘等。
找到包含四边形的平面
接下来看看第一步,找到包含四边形的平面方程。给定四边形的几何量
回想一下平面方程的定义,Quad 类中:
class Quad : public Hittable { public: Quad(const Point3& Q, const Vec3& u, const Vec3& v, shared_ptr<Material> material) : Q(Q), u(u), v(v), material(material) { Vec3 n = cross(u, v); normal = unitVector(n); D = dot(normal, Q); set_bounding_box(); } ... private: Point3 Q; Vec3 u, v; shared_ptr<Material> material; AABB bbox; Vec3 normal; double D; };
可以实现针对无限大四边形的 hit() 函数了:
bool hit(const Ray& r, Interval ray_t, HitRecord& rec) const override { double denom = dot(normal, r.direction()); // 光线和平面平行, miss if (std::fabs(denom) < 1e-8) { return false; } // 求解t, 在范围外就返回false double t = (D - dot(normal, r.origin())) / denom; if (!ray_t.contains(t)) { return false; } Point3 intersection = r.at(t); // 更新rec rec.t = t; rec.position = intersection; rec.material = material; rec.set_face_normal(r, normal); return true; }
定位平面上的点
目前,相交点在包含四边形的平面上,但可能在四边形外部或内部。如果在四边形内部,就说明被击中了。为了知道相交点是否在四边形内部,且为了给它分配纹理坐标,我们需要定位平面上的相交点。
我们需要在平面上建系,如图:
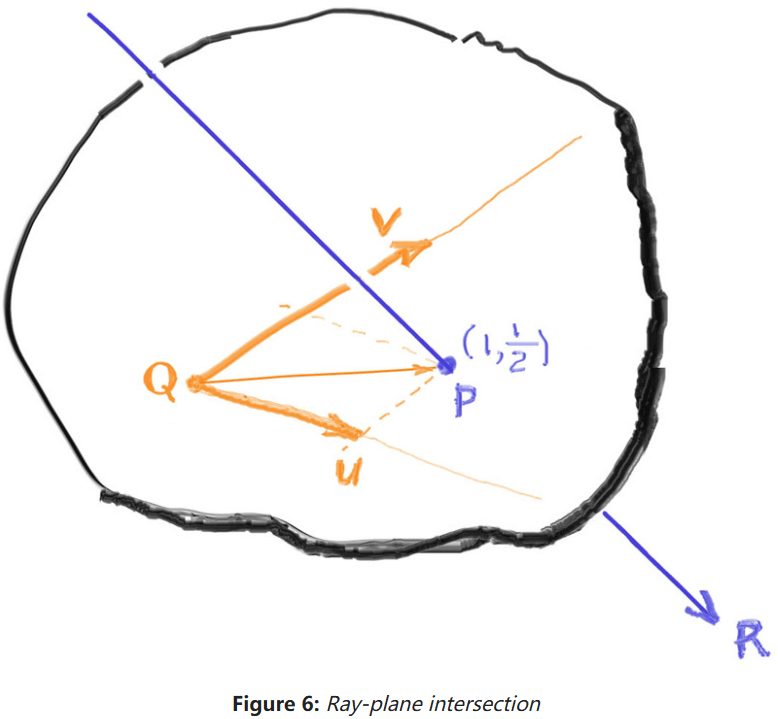
光线
一般的,点
class Quad : public Hittable { public: Quad(const Point3& Q, const Vec3& u, const Vec3& v, shared_ptr<Material> material) : Q(Q), u(u), v(v), material(material) { Vec3 n = cross(u, v); normal = unitVector(n); D = dot(normal, Q); w = n / dot(n, n); set_bounding_box(); } ... private: Point3 Q; Vec3 u, v; Vec3 w; ... };
相交点的 UV 坐标系内部测试
有了相交点在四边形所在平面的坐标,就能判断其是否在四边形内了。
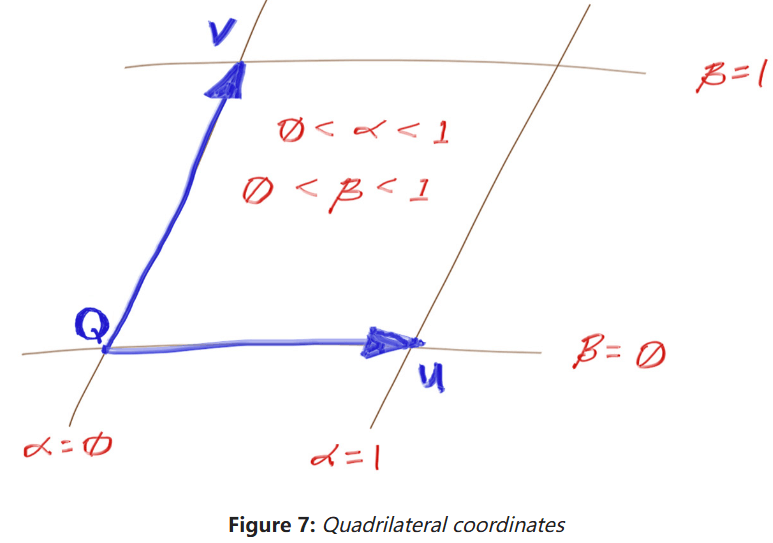
如图,判断相交点是否在四边形内,只需满足如下条件:
继续完善 hit() 如下:
bool hit(const Ray& r, Interval ray_t, HitRecord& rec) const override { double denom = dot(normal, r.direction()); // 光线和平面平行, miss if (std::fabs(denom) < 1e-8) { return false; } // 求解t, 在范围外就返回false double t = (D - dot(normal, r.origin())) / denom; if (!ray_t.contains(t)) { return false; } // 相交点是否在四边形内 Point3 intersection = r.at(t); Vec3 planar_hitpt_vector = intersection - Q; double alpha = dot(w, cross(planar_hitpt_vector, v)); double beta = dot(w, cross(u, planar_hitpt_vector)); if (!is_interior(alpha, beta, rec)) { return false; } // 更新rec rec.t = t; rec.position = intersection; rec.material = material; rec.set_face_normal(r, normal); return true; } // 判断点是否在四边形内部 virtual bool is_interior(double a, double b, HitRecord& rec) const { Interval unit_interval = Interval(0, 1); if (!unit_interval.contains(a) || !unit_interval.contains(b)) { return false; } rec.u = a; rec.v = b; return true; }
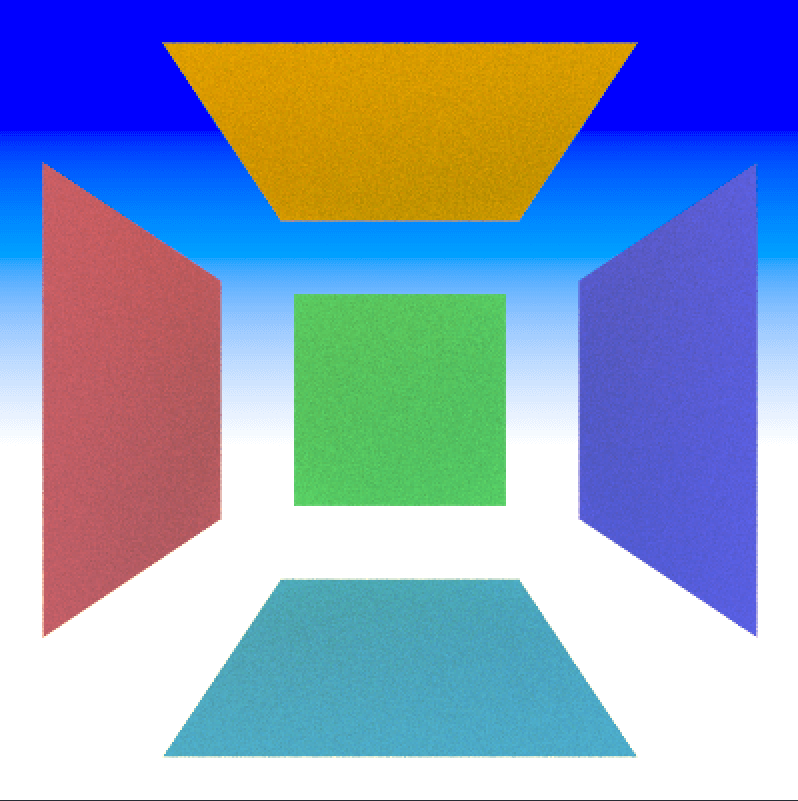
接下来新创一个场景看看:
void quadsScene(HittableList& world, Camera& cam) { auto left_red = make_shared<Lambertian>(Color(1.0, 0.2, 0.2)); auto back_green = make_shared<Lambertian>(Color(0.2, 1.0, 0.2)); auto right_blue = make_shared<Lambertian>(Color(0.2, 0.2, 1.0)); auto upper_orange = make_shared<Lambertian>(Color(1.0, 0.5, 0.0)); auto lower_teal = make_shared<Lambertian>(Color(0.2, 0.8, 0.8)); world.add(make_shared<Quad>(Point3(-3, -2, 5), Vec3(0, 0, -4), Vec3(0, 4, 0), left_red)); world.add(make_shared<Quad>(Point3(-2, -2, 0), Vec3(4, 0, 0), Vec3(0, 4, 0), back_green)); world.add(make_shared<Quad>(Point3(3, -2, 1), Vec3(0, 0, 4), Vec3(0, 4, 0), right_blue)); world.add(make_shared<Quad>(Point3(-2, 3, 1), Vec3(4, 0, 0), Vec3(0, 0, 4), upper_orange)); world.add(make_shared<Quad>(Point3(-2, -3, 5), Vec3(4, 0, 0), Vec3(0, 0, -4), lower_teal)); cam.aspectRadio = 1.0; cam.imgWidth = 400; cam.samples_per_pixel = 100; cam.max_depth = 50; cam.vfov = 80; cam.lookFrom = Point3(0, 0, 9); cam.lookAt = Point3(0, 0, 0); cam.vup = Vec3(0, 1, 0); cam.defocus_angle = 0; }
结果如下:
添加其他 2D 图元
可以举一反三添加其他 2D 图元了,例如半径为 r 的圆盘,is_interior() 返回 true 的条件为 sqrt(a * a + b * b) < r;例如三角形,条件是 a > 0 && b > 0 && a + b < 1。更多图元(圆环等)详见教程仓库 src/TheNextWeek/quad.h。
光源
光源是光线追踪的关键部分。早期简单的光追渲染器使用抽象光源,例如点光源,平行光。现代方法则使用更多基于物理的光源,有尺寸和位置属性。为了创建这些光源,我们需要将任一常规物体转化为场景中的光源。
自发光材质
首先让我们创建一个自发光材质 DiffuseLight。需要添加一个自发光方程:
class DiffuseLight : public Material { public: DiffuseLight(shared_ptr<Texture> tex) : tex(tex) {} DiffuseLight(const Color& emit) : tex(make_shared<SolidColor>(emit)) {} Color emitted(double u, double v, const Point3& p) const override { return tex->value(u, v, p); } private: shared_ptr<Texture> tex; };
别忘了在父类 Material 中补充 emitted():
virtual Color emitted(double u, double v, const Point3& p) const { return Color(0, 0, 0); }
给 ray_color() 添加背景色
接下来,我们想要一个纯黑的背景,以便只有光源在发光。需要修改一下 Camera 类:
class Camera { public: double aspectRadio = 1.0; // 图像的宽高比 int imgWidth = 100; // 图像宽度 int samples_per_pixel = 10; // 每像素采样数, 即SPP int max_depth = 10; // 光线的最大弹射次数 Color background; // 场景的背景色 ... private: ... Color ray_color(const Ray& r, int depth, const Hittable& world) const { // 递归退出 if (depth <= 0) { return Color(0, 0, 0); } // 光线没打中物体, 返回背景色 HitRecord rec; if (!world.hit(r, Interval(0.001, infinity), rec)) { return background; } // 光线打到物体, 看情况返回这条光线的颜色 Ray scattered; Color attenuation; Color color_from_emission = rec.material->emitted(rec.u, rec.v, rec.position); if (!rec.material->scatter(r, rec, attenuation, scattered)) { return color_from_emission; } Color color_from_scatter = attenuation * ray_color(scattered, depth - 1, world); return color_from_emission + color_from_scatter; } };
别往了给之前的场景设定颜色,因为那些场景没有光源:
cam.background = Color(0.70, 0.80, 1.00);
将物体转换为光源
接下来将一个矩形设置为光源:
void simpleLightScene(HittableList& world, Camera& cam) { auto perlin_tex = make_shared<NoiseTexture>(4); world.add(make_shared<Sphere>(Point3(0, -1000, 0), 1000, make_shared<Lambertian>(perlin_tex))); world.add(make_shared<Sphere>(Point3(0, 2, 0), 2, make_shared<Lambertian>(perlin_tex))); auto diffuse_light = make_shared<DiffuseLight>(Color(4, 4, 4)); world.add(make_shared<Quad>(Point3(3, 1, -2), Vec3(2, 0, 0), Vec3(0, 2, 0), diffuse_light)); cam.aspectRadio = 16.0 / 9.0; cam.imgWidth = 400; cam.samples_per_pixel = 100; cam.max_depth = 50; cam.background = Color(0, 0, 0); cam.vfov = 20; cam.lookFrom = Point3(26, 3, 6); cam.lookAt = Point3(0, 2, 0); cam.vup = Vec3(0, 1, 0); cam.defocus_angle = 0; }
结果如下:
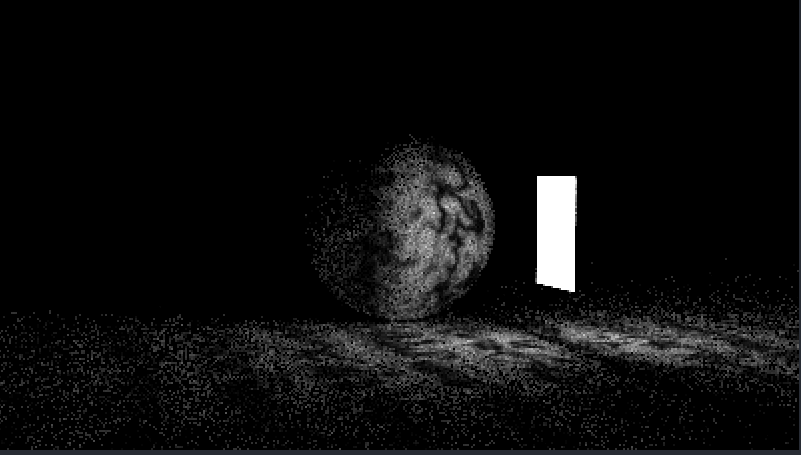
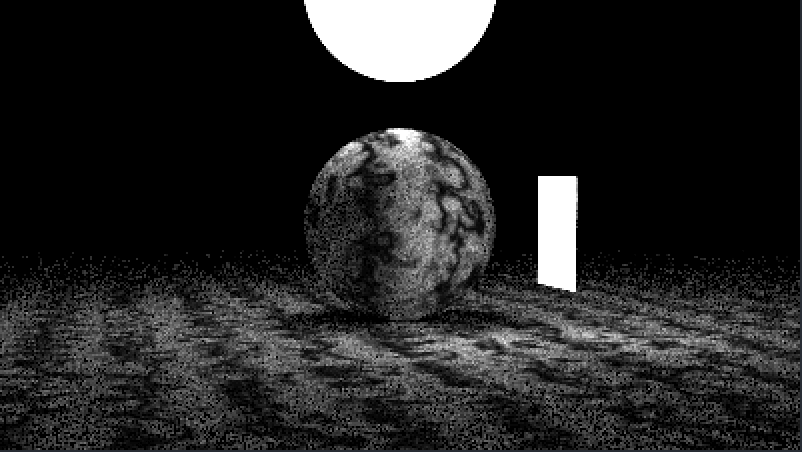
注意到光源比 (1, 1, 1) 亮,这允许它照亮场景。然后再加一个球体光源试试:
world.add(make_shared<Sphere>(Point3(0, 7, 0), 2, diffuse_light));
结果如下:
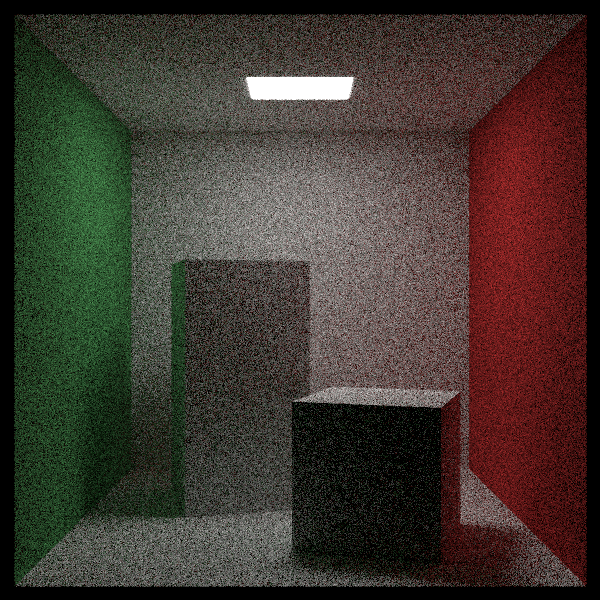
创建空的康奈尔盒场景
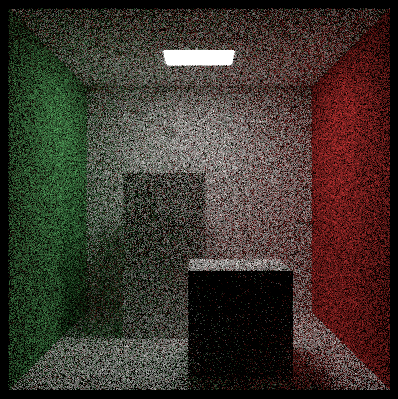
有了光源和四边形,就能创建经典的康奈尔盒子场景了:
void cornellBoxScene(HittableList& world, Camera& cam) { auto white = make_shared<Lambertian>(Color(0.73, 0.73, 0.73)); auto red = make_shared<Lambertian>(Color(0.65, 0.05, 0.05)); auto green = make_shared<Lambertian>(Color(0.12, 0.45, 0.15)); auto light = make_shared<DiffuseLight>(Color(15, 15, 15)); world.add(make_shared<Quad>(Point3(555, 0, 0), Vec3(0, 555, 0), Vec3(0, 0, 555), green)); world.add(make_shared<Quad>(Point3(0, 0, 0), Vec3(0, 555, 0), Vec3(0, 0, 555), red)); world.add(make_shared<Quad>(Point3(343, 554, 332), Vec3(-130, 0, 0), Vec3(0, 0, -105), light)); world.add(make_shared<Quad>(Point3(0, 0, 0), Vec3(555, 0, 0), Vec3(0, 0, 555), white)); world.add(make_shared<Quad>(Point3(555, 555, 555), Vec3(-555, 0, 0), Vec3(0, 0, -555), white)); world.add(make_shared<Quad>(Point3(0, 0, 555), Vec3(555, 0, 0), Vec3(0, 555, 0), white)); cam.aspectRadio = 1.0; cam.imgWidth = 600; cam.samples_per_pixel = 200; cam.max_depth = 50; cam.background = Color(0, 0, 0); cam.vfov = 40; cam.lookFrom = Point3(278, 278, -800); cam.lookAt = Point3(278, 278, 0); cam.vup = Vec3(0, 1, 0); cam.defocus_angle = 0; }
结果如下:
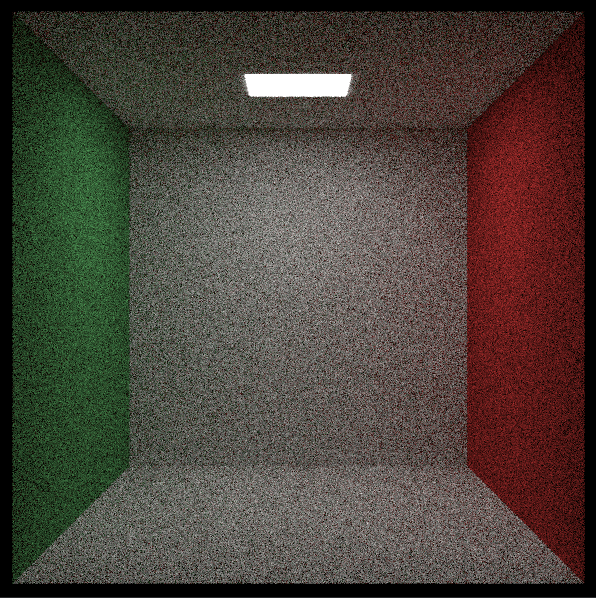
图片噪点非常多是因为光源太小了,所以大多数随机光线都没打到光源再反弹。
场景实例
康奈尔盒场景还有两个方块,它们相对墙面是被旋转过的。首先,先实现一个创建盒子的函数,通过创建包含 6 个矩形的 HittableList:
// Quad.hpp // 返回由两个点确定的3D盒子 inline shared_ptr<HittableList> box(const Point3& a, const Point3& b, shared_ptr<Material> material) { auto sides = make_shared<HittableList>(); Point3 min = Point3(std::fmin(a.x(), b.x()), std::fmin(a.y(), b.y()), std::fmin(a.z(), b.z())); Point3 max = Point3(std::fmax(a.x(), b.x()), std::fmax(a.y(), b.y()), std::fmax(a.z(), b.z())); Vec3 dx = Vec3(max.x() - min.x(), 0, 0); Vec3 dy = Vec3(0, max.y() - min.y(), 0); Vec3 dz = Vec3(0, 0, max.z() - min.z()); sides->add(make_shared<Quad>(Point3(min.x(), min.y(), max.z()), dx, dy, material)); // 前 sides->add(make_shared<Quad>(Point3(max.x(), min.y(), max.z()), -dz, dy, material)); // 右 sides->add(make_shared<Quad>(Point3(max.x(), min.y(), min.z()), -dx, dy, material)); // 后 sides->add(make_shared<Quad>(Point3(min.x(), min.y(), min.z()), dz, dy, material)); // 左 sides->add(make_shared<Quad>(Point3(min.x(), max.y(), max.z()), dx, -dz, material)); // 上 sides->add(make_shared<Quad>(Point3(min.x(), min.y(), min.z()), dx, dz, material)); // 下 return sides; }
然后在场景中添加盒子:
world.add(box(Point3(130, 0, 65), Point3(295, 165, 230), white)); world.add(box(Point3(265, 0, 295), Point3(430, 330, 460), white));
结果如下:
有了盒子后,接下来要将它们旋转。在光线追踪中,这通常由实例完成。实例是场景中几何图元的拷贝,同图元的每个实例都是独立的,这意味着对一个实例进行平移和旋转不会影响其他实例。
实例的平移
在光线追踪中,平移物体不如平移光线。例如下图将粉盒子向右平移得到黑盒子:
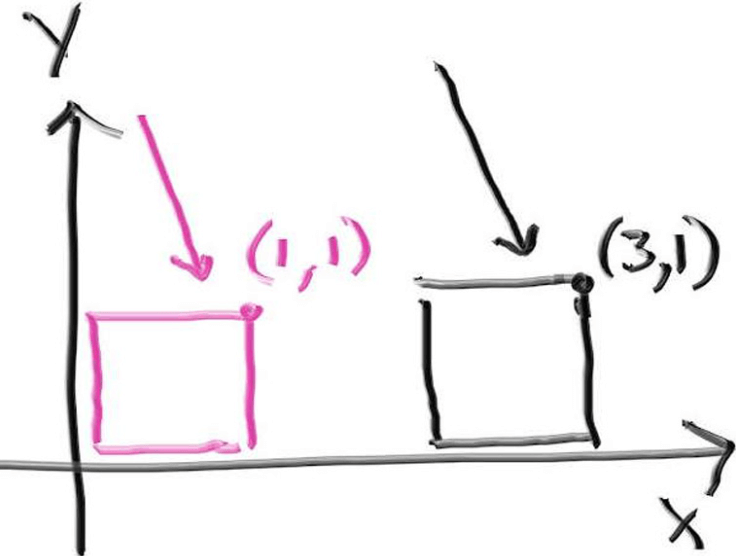
与其让盒子向右移动,不如让光线向左移动,这样盒子就 “相对向右移动” 了,和摄像机实现移动的原理一样。但还需要注意的是,相交点是和盒子一起移动的,因此如果向左移动后的光线仍打到盒子,就让相交点向右移动。
实现平移的类 Translate 如下:
class Translate : public Hittable { public: Translate(shared_ptr<Hittable> object, const Vec3& offset) : object(object), offset(offset) { bbox = object->bounding_box() + offset; } bool hit(const Ray& r, Interval ray_t, HitRecord& rec) const override { // 让光反向移动, 以实现物体移动的效果 Ray offset_r(r.origin() - offset, r.direction(), r.time()); // 移动后的光是否打到物体, 是的话就让相交点正向移动 if (!object->hit(offset_r, ray_t, rec)) { return false; } rec.position += offset; return true; } AABB bounding_box() const override { return bbox; } private: shared_ptr<Hittable> object; Vec3 offset; AABB bbox; };
别忘了重载 AABB 类和 Interval 类的运算符:
// aabb.hpp ... const AABB AABB::empty = AABB(Interval::empty, Interval::empty, Interval::empty); const AABB AABB::universe = AABB(Interval::universe, Interval::universe, Interval::universe); inline AABB operator+(const AABB& bbox, const Vec3& offset) { return AABB(bbox.x + offset.x(), bbox.y + offset.y(), bbox.z + offset.z()); } inline AABB operator+(const Vec3& offset, const AABB& bbox) { return bbox + offset; }
// interval.hpp ... const Interval Interval::empty = Interval(+infinity, -infinity); const Interval Interval::universe = Interval(-infinity, +infinity); inline Interval operator+(const Interval& ival, double displacement) { return Interval(ival.min + displacement, ival.max + displacement); } inline Interval operator+(double displacement, const Interval& ival) { return ival + displacement; }
实例的旋转
直接给出绕轴逆时针旋转的公式:
绕 X 轴逆时针旋转:
- 将光线逆向移动
offset; - 移动后的光线是否和物体相交;
- 是的话就将相交点正向移动
offset。
这种想法实际上就是改变坐标系:
- 将光线从世界坐标系转换到物体的模型坐标系;
- 在模型坐标系中,光线是否和物体相交;
- 是的话就将相交点从模型坐标系转换到世界坐标系。
也可以按这种思想去研究旋转这一情况。此外,旋转一个物体还将改变它表面的法线,也能通过上述公式去旋转法线。(但是缩放不是这样子的,如果要实现缩放还需研究表面法线变换。)
实现旋转的类 Rotate 如下:
enum class RotateAxis { X, Y, Z }; class Rotate : public Hittable { public: Rotate(shared_ptr<Hittable> object, RotateAxis axis, double angle) : object(object), axis(axis), angle(angle) { bbox = object->bounding_box(); // 利用线性插值找旋转后的bbox Point3 min(infinity, infinity, infinity); Point3 max(-infinity, -infinity, -infinity); for (int i = 0; i < 2; ++i) { for (int j = 0; j < 2; ++j) { for (int k = 0; k < 2; ++k) { double x = i * bbox.x.max + (1 - i) * bbox.x.min; double y = j * bbox.y.max + (1 - j) * bbox.y.min; double z = k * bbox.z.max + (1 - k) * bbox.z.min; Vec3 tester = rotate(Vec3(x, y, z), axis); for (int c = 0; c < 3; ++c) { min[c] = std::fmin(min[c], tester[c]); max[c] = std::fmax(max[c], tester[c]); } } } } bbox = AABB(min, max); } bool hit(const Ray& r, Interval ray_t, HitRecord& rec) const override { // 首先逆向旋转光线, 将光线从世界坐标系转换为模型坐标系 Point3 origin = rotate(r.origin(), axis, false); Vec3 direction = rotate(r.direction(), axis, false); Ray rotated_r(origin, direction, r.time()); // 在模型坐标系中, 光线是否和物体相交 if (!object->hit(rotated_r, ray_t, rec)) { return false; } // 是的话就将正向旋转相交点和法线, 从模型坐标系转换到世界坐标系 rec.position = rotate(rec.position, axis); rec.normal = rotate(rec.normal, axis); return true; } AABB bounding_box() const override { return bbox; } private: shared_ptr<Hittable> object; RotateAxis axis; double angle; AABB bbox; // 默认按逆时针旋转向量Vec Vec3 rotate(const Vec3& vec, RotateAxis axis, bool is_ccw = true) const { double radians = degrees_to_radians(angle); if (!is_ccw) { radians = -radians; } double sin_theta = std::sin(radians); double cos_theta = std::cos(radians); Vec3 ret; if (axis == RotateAxis::X) { ret.e[0] = vec.x(); ret.e[1] = (cos_theta * vec.y()) - (sin_theta * vec.z()); ret.e[2] = (sin_theta * vec.y()) + (cos_theta * vec.z()); } else if (axis == RotateAxis::Y) { ret.e[0] = (cos_theta * vec.x()) + (sin_theta * vec.z()); ret.e[1] = vec.y(); ret.e[2] = (-sin_theta * vec.x()) + (cos_theta * vec.z()); } else if (axis == RotateAxis::Z) { ret.e[0] = (cos_theta * vec.x()) - (sin_theta * vec.y()); ret.e[1] = (sin_theta * vec.x()) + (cos_theta * vec.y()); ret.e[2] = vec.z(); } return ret; } };
然后调整下两个盒子:
shared_ptr<Hittable> box1 = box(Point3(0, 0, 0), Point3(165, 330, 165), white); box1 = make_shared<Rotate>(box1, RotateAxis::Y, 15); box1 = make_shared<Translate>(box1, Vec3(265, 0, 295)); world.add(box1); shared_ptr<Hittable> box2 = box(Point3(0, 0, 0), Point3(165, 165, 165), white); box2 = make_shared<Rotate>(box2, RotateAxis::Y, -18); box2 = make_shared<Translate>(box2, Vec3(130, 0, 65)); world.add(box2);
最终结果如下: