02 - Gameplay中的AI基础
本文将简要介绍一些游戏引擎中Gameplay玩法系统中有关AI的基础部分,包括:
- 寻路系统;
- 转向系统;
- 群体模拟;
- 感知;
寻路系统
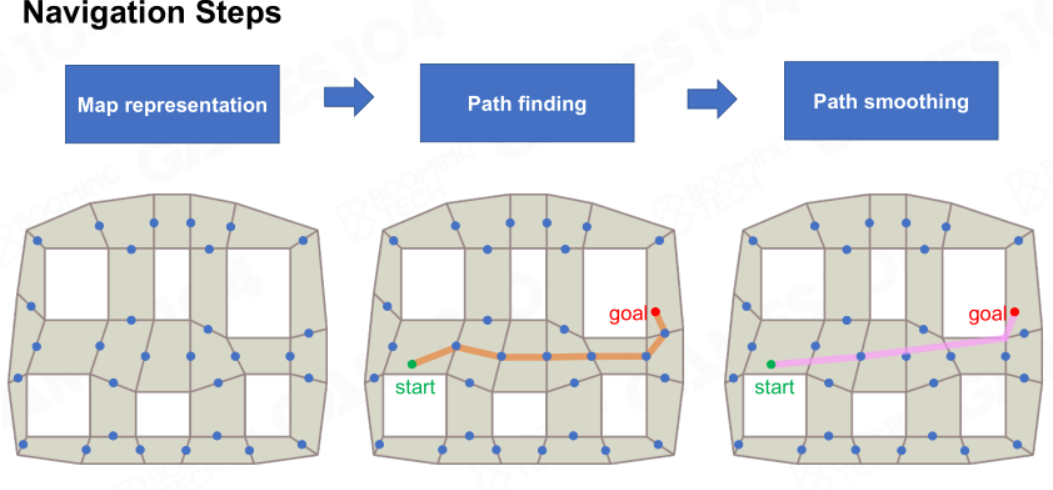
要实现一个寻路系统,需要完成如下三步:
- 表达地图
- 生成路线
- 平滑路线
表达地图
首先要告诉AI地图上哪些地方可达:
接下来需要选择表达的形式:
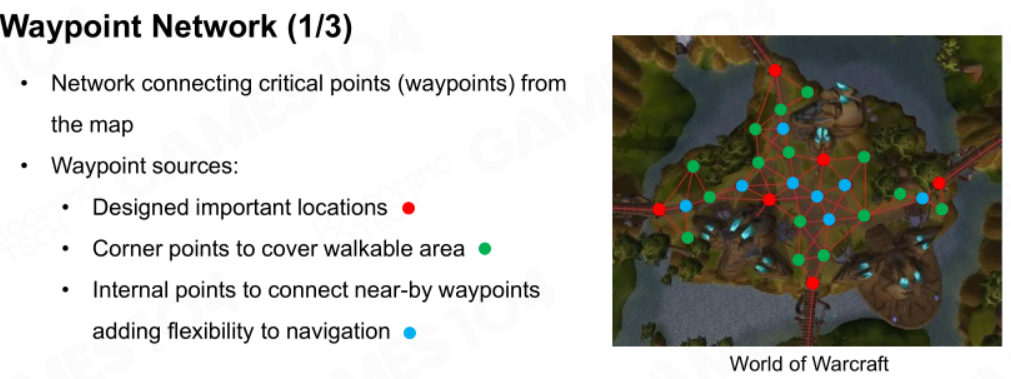
路径点网络
用于早期游戏。通过在地图上人为设置一些重要路径点和边界点,进而插值出一些中间点。AI可以通过这些点达成寻路的目的。
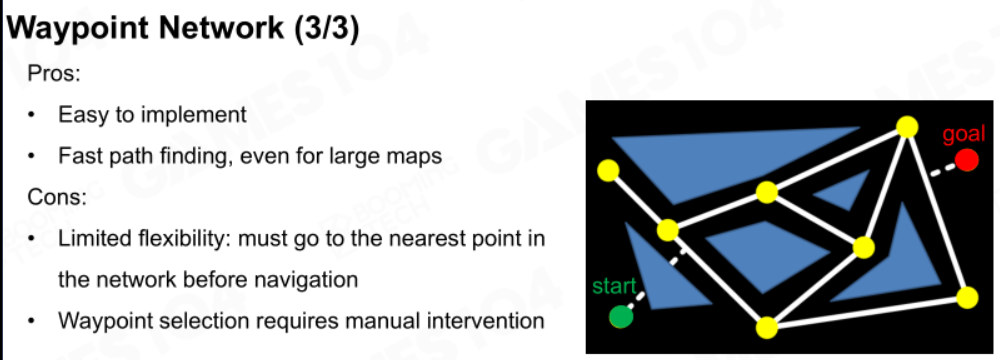
它的优缺点如下:
网格
可以用均匀网格将可达区域分开,通过一些寻路算法让AI在网格间行走。
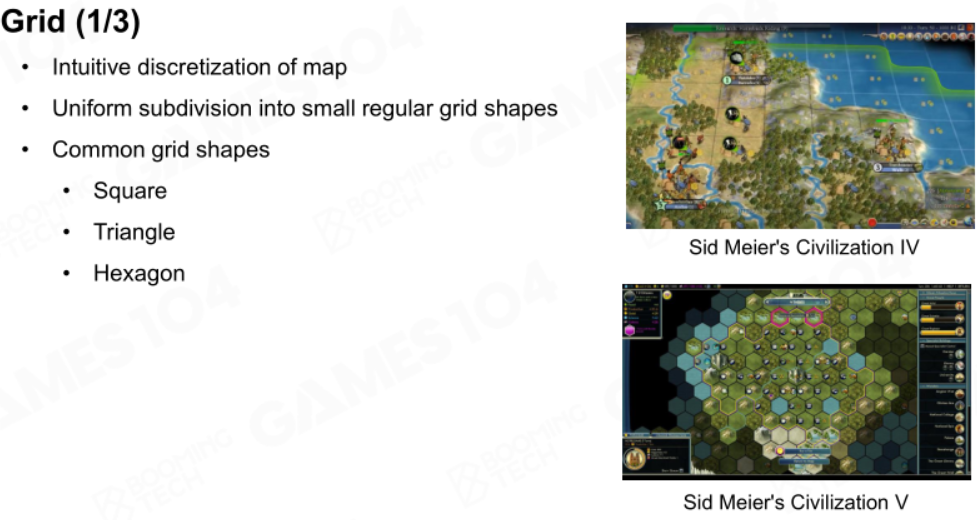
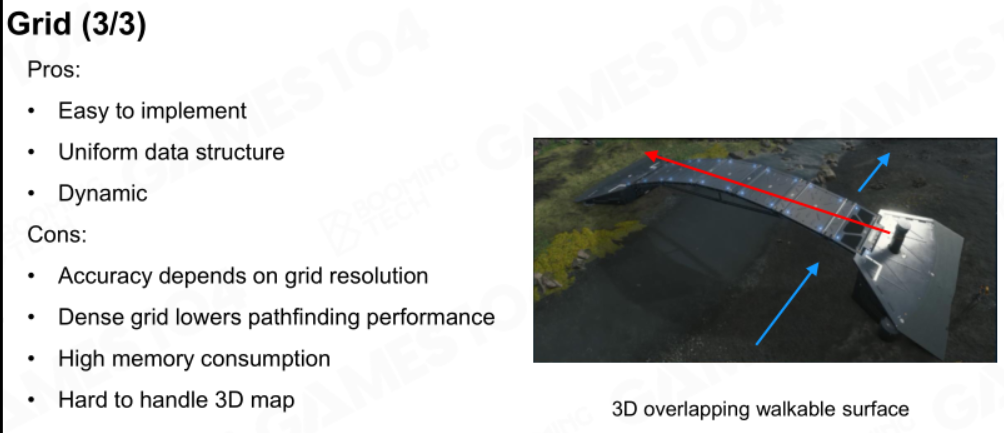
使用网格进行寻路的一个优点就是适应动态环境,场景发生变化时,只需更新一下网格中的障碍物信息即可。
网格的其他优缺点如下:
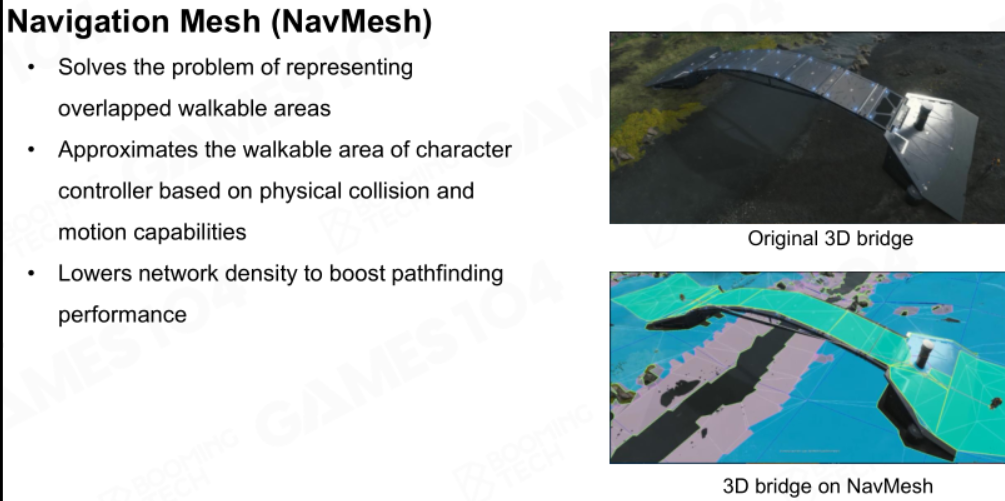
NavMesh
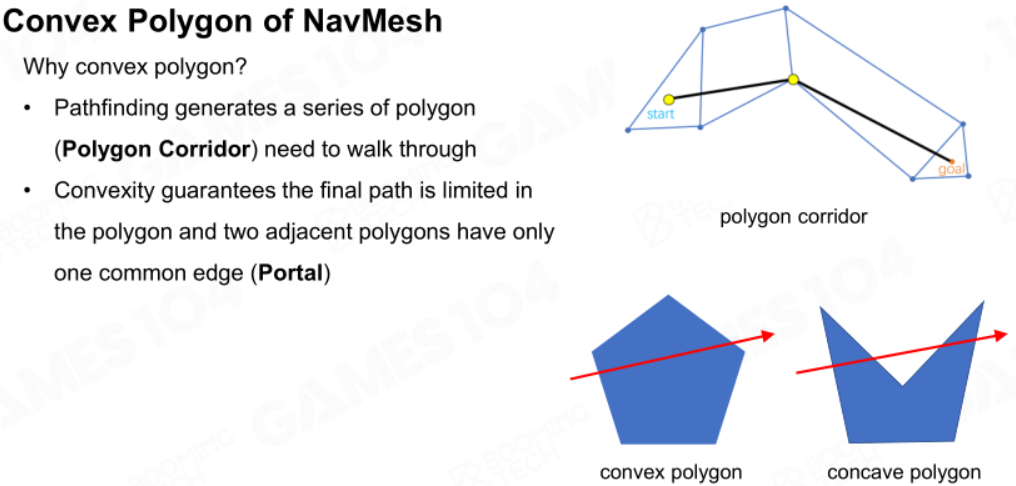
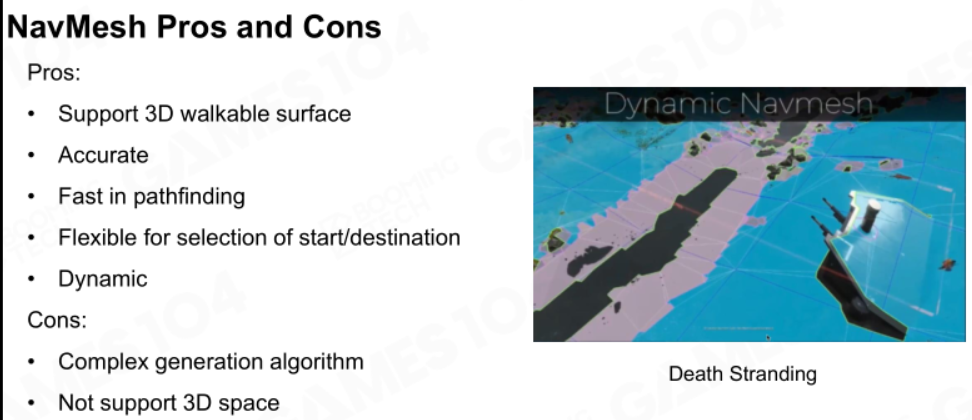
前面两种方法忽略了地图的立体性,如果可达区域是立体重叠的,AI可能会不知道怎么走。而导航网格体NavMesh则解决了这个问题,它将场景可达区域用一个个凸多边形覆盖,让AI更自由。
为什么是凸多边形,因为凹多边形会让AI行进路线更曲折,且容易让它走到非可达区域。
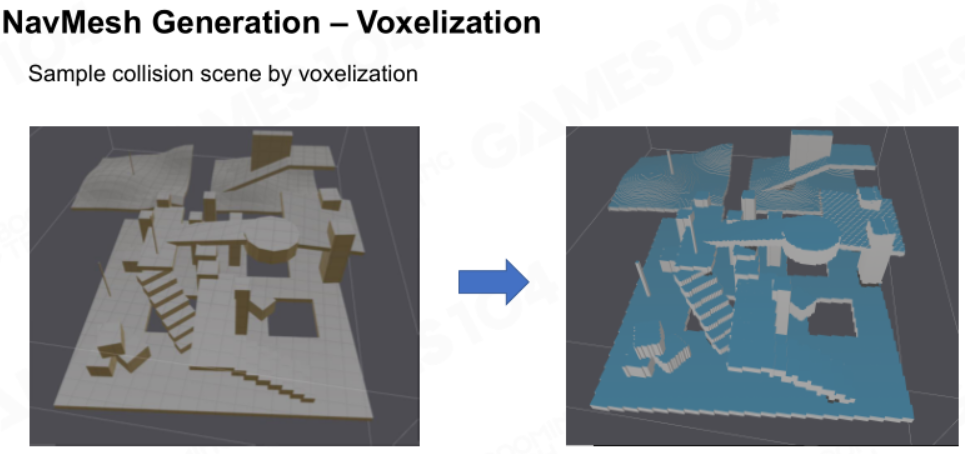
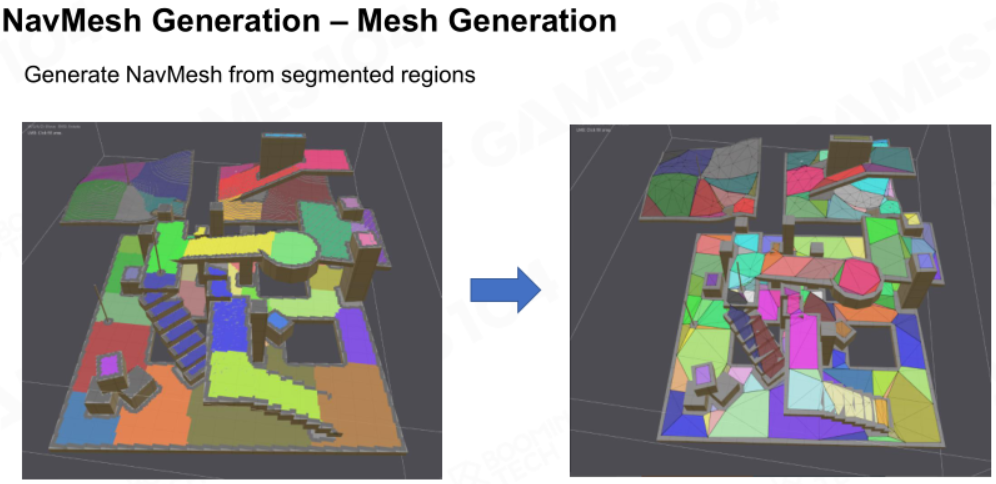
接下来看看导航网格体是如何生成的。首先要对地图进行体素化,计算可达区域(蓝色):
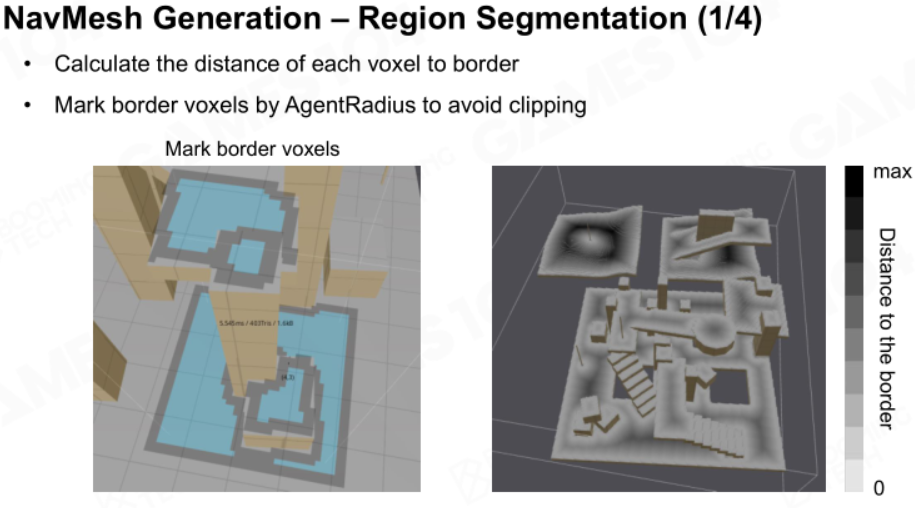
然后要识别可达区域的边界,这需要计算SDF,并通过洪水算法得到边界:
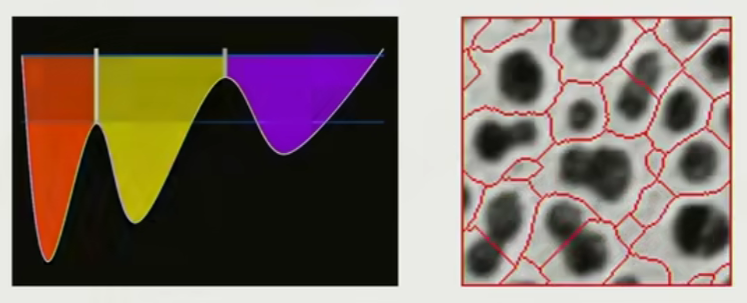
这样就能得到对可达区域的合理划分:
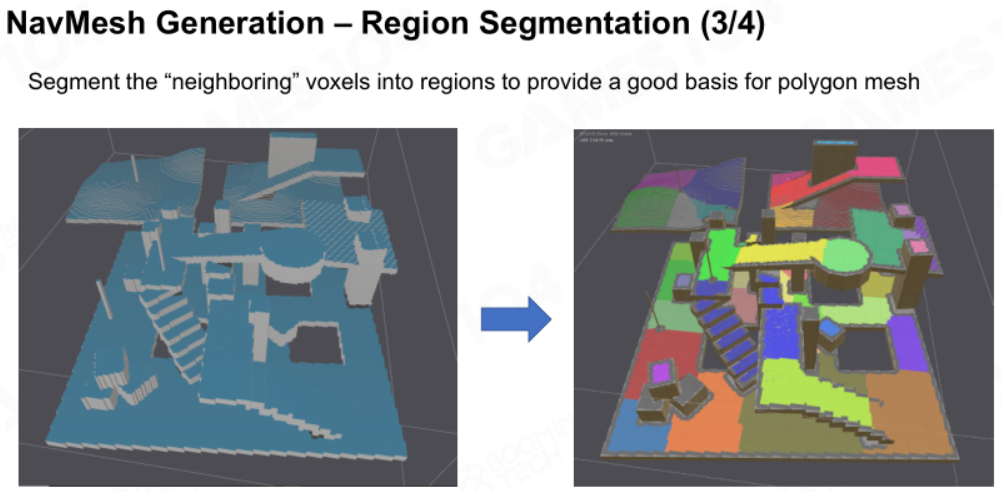
别忘了NavMesh由凸多边形组成,还需要进一步将可达区域进行细分:
此外,高级的NavMesh还拥有如下特点:
- 自定义标识:用户可以对NavMesh进行自定义标识,例如草原河流。
- 分块:大世界中只有一小部分场景出现变化,只需更新那一块的NavMesh即可,不需要更新整个地图的NavMesh。
- 不同Mesh的联系:允许AI通过跳跃或传送的方式进行寻路,而不是单纯的走路。
导航网格体的优缺点如下:
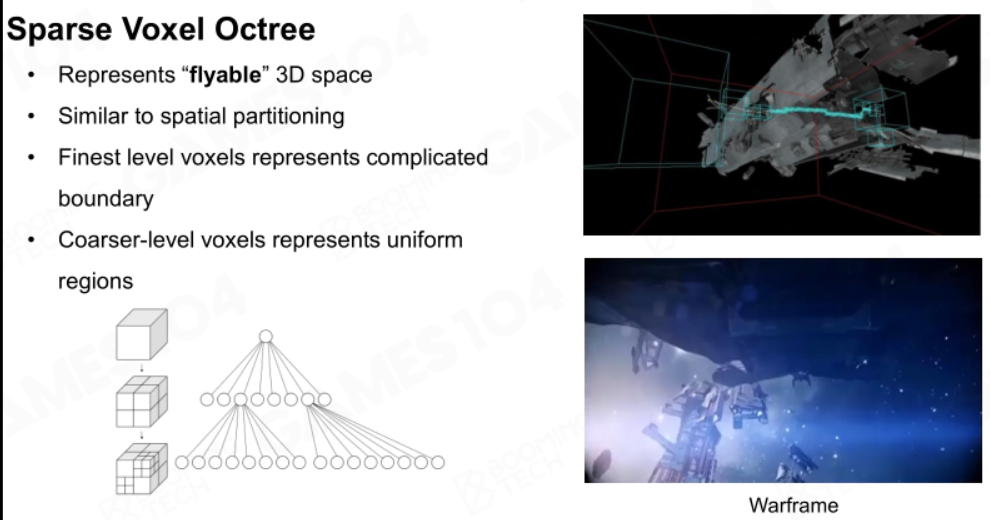
空间八叉树
前面的方法不能支持空中AI的寻路,这需要在空间中用八叉树划分才能实现。
生成路线
接下来需要在这些地图表达中找到一条从起点到终点的路线,这是一个图论中最短路径的问题。
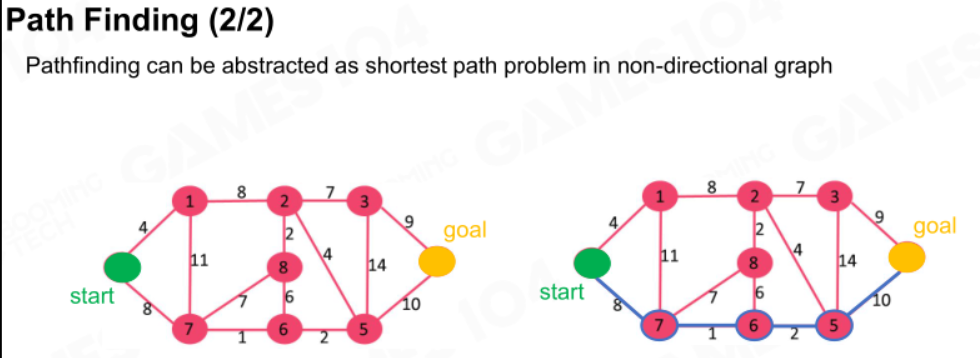
常用的寻路算法有Dijkstra算法,A*算法等,这里看看A*算法。
A*算法和Dijkstra算法相似,但它是一个启发式算法,性能比较好。
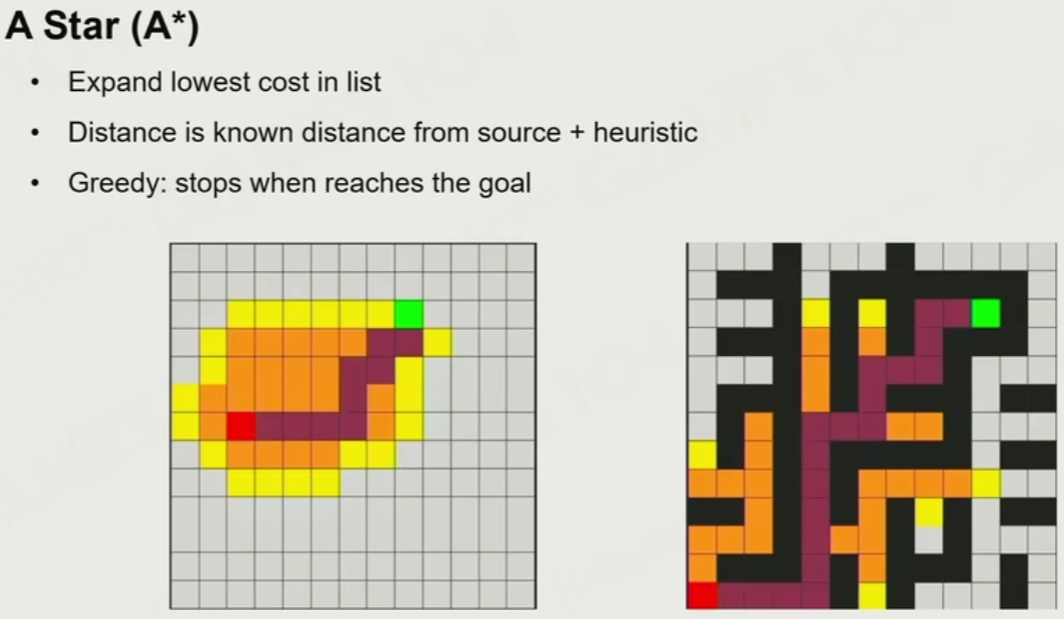
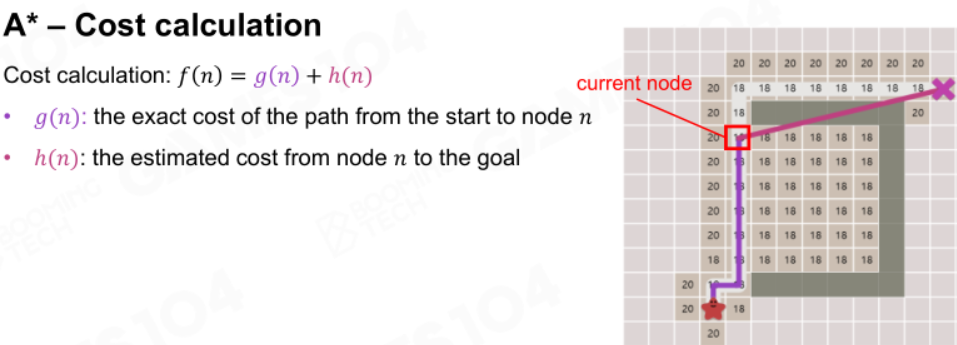
在路线代价的计算中,它不仅要计算从起点到当前节点的具体代价,还要估算当前节点到终点的代价(启发函数),找到终点后算法就结束了。
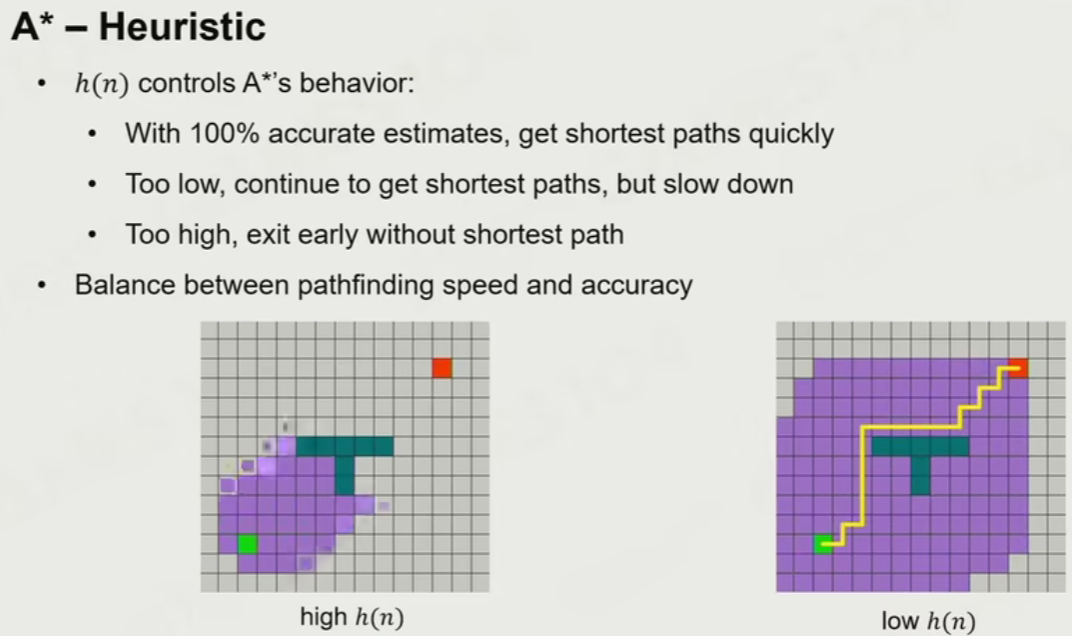
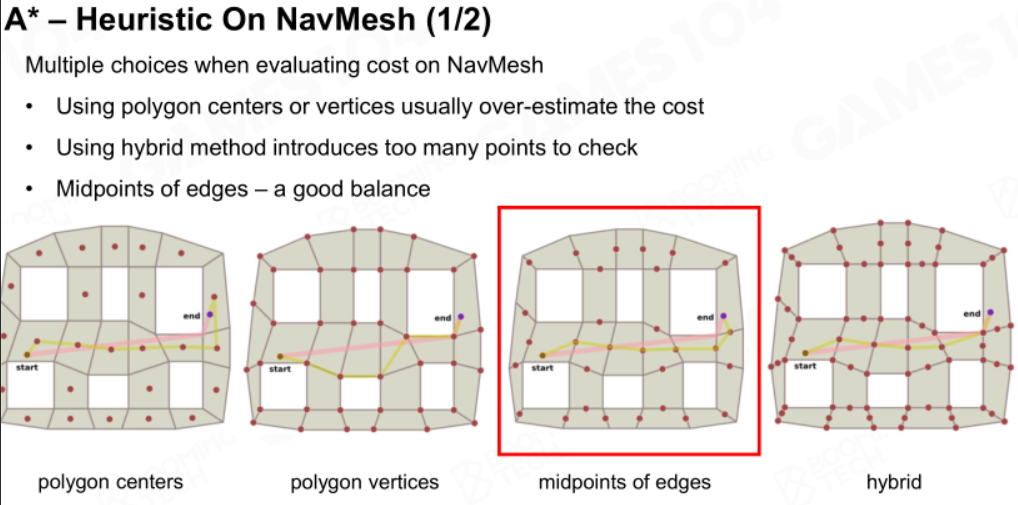
启发函数影响A*算法的速度和精准度,需要在二者中去平衡。
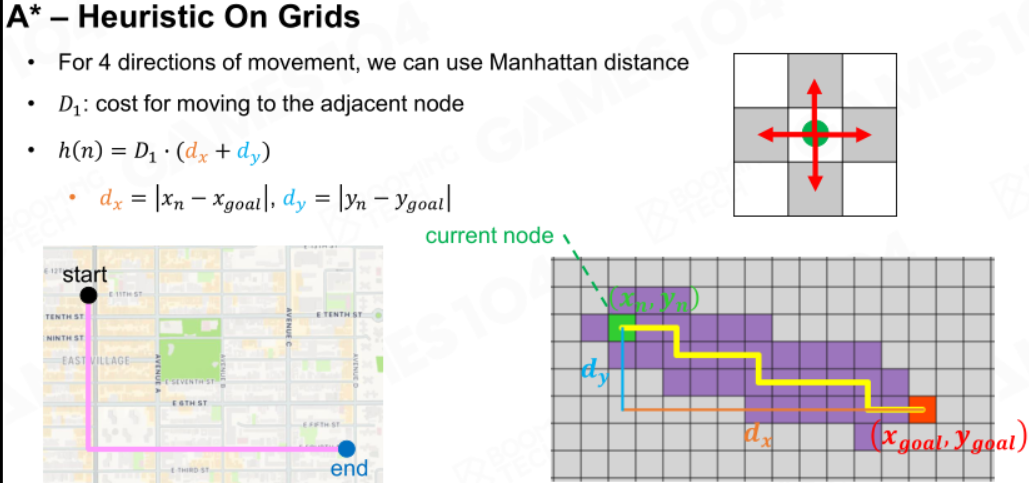
在四向移动的前提下(如网格),可以用曼哈顿距离充当启发函数:
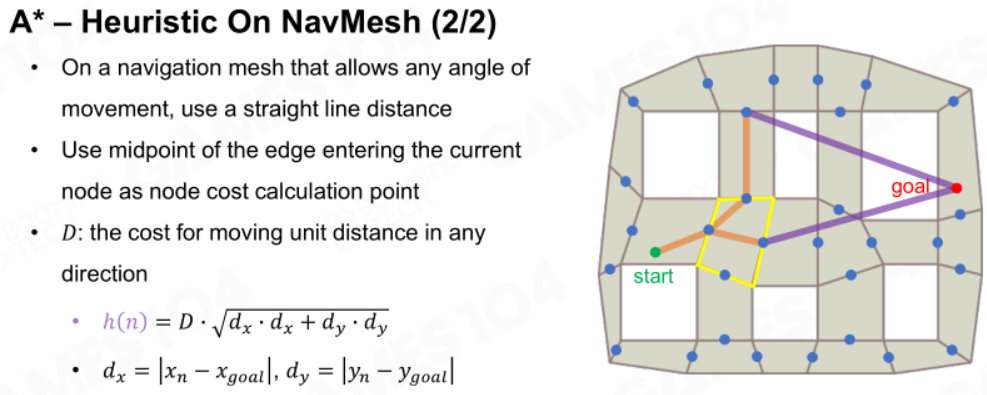
对于在多边形走廊中寻路的NavMesh,路径点是各多边形边的中点,启发函数是该点和终点的欧几里得距离。
平滑路线
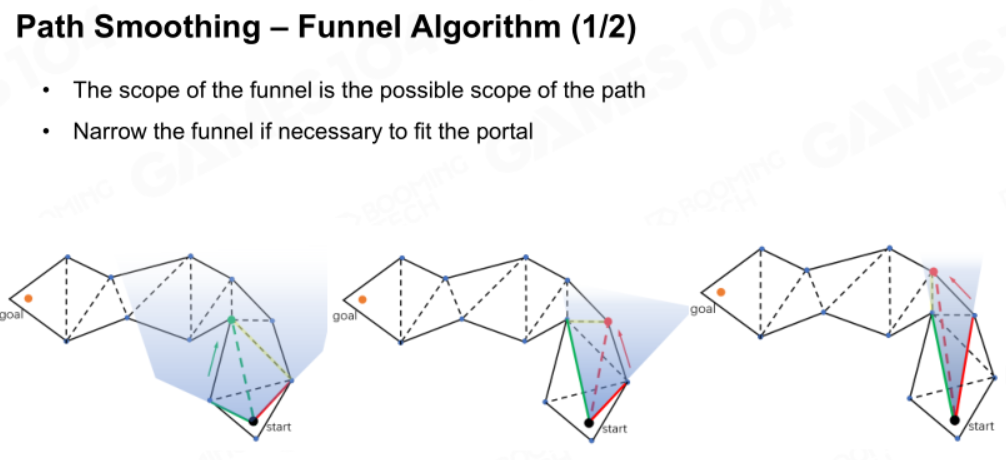
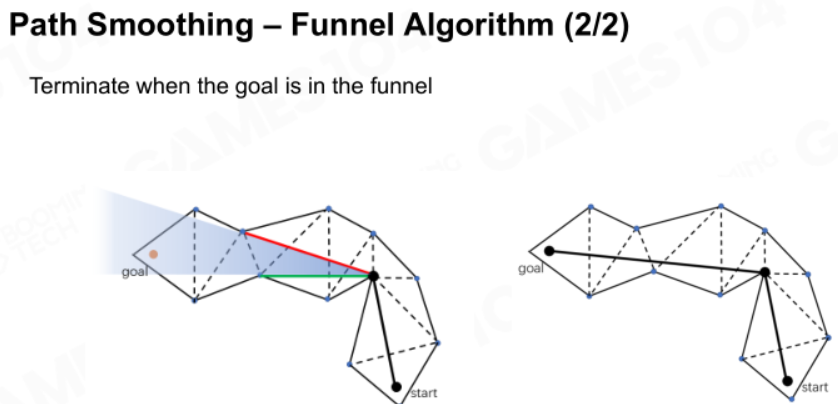
生成最短路线后,为了让AI表现得更自然,需要对路线进行平滑操作。常用的算法之一就是Funnel算法,它通过将扇形视线覆盖在路径上,不断减少覆盖范围尽可能走直线,如果覆盖不到下一个路径点说明该转弯了。
转向系统
TODO
参考资料
- GAMES104 (boomingtech.com)