03 - VSSM与MSM
早期为了优化PCSS的性能问题,人们想出了使用VSSM(Variance Soft Shadow Mappnig),本文将简要介绍一下它的思路。另外文末将简要介绍一下VSSM的优化——MSM(Moment Shadow Mapping)。
VSSM
引入
PCSS的第一步(块查询)和第三步(PCF)太慢了,得想法子优化:
对于第一步,就是要想出一个更快的块查询算法;
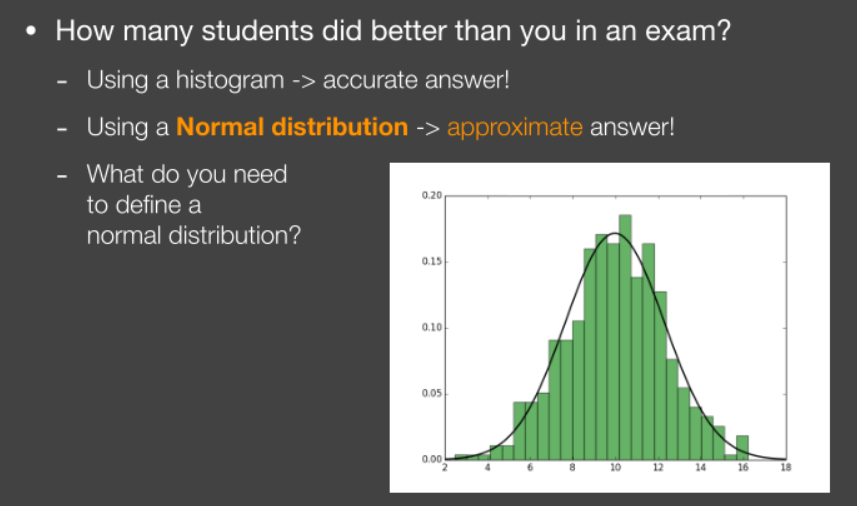
对于第三步该怎么进行优化呢,先想一个问题:考试后知道自己的成绩,求自己排名?有两种解法:
精确解法:问每个人成绩,得到成绩分布直方图,从而得到具体排名。
近似解法:使用正态分布,根据自己成绩可得出近似排名。
而这个近似解法正是VSSM所采用的思想,会用到一个不具体的分布,然后得出有多少纹素的深度值比自己低。
思路
VSSM的核心思路就是 快速计算某区域内深度的均值(Mean/Avg)与方差(Variance)。
求均值
可以使用Mipmap(不怎么准,只能求方形纹理);也可以使用 Summed Area Tables(SAT)。SAT的具体内容将在下文中考虑。
求方差
需要用到如下公式:
求解CDF(depth)
CDF(depth) 就是在某分布PDF(depth) 中,
depth所占的比例。
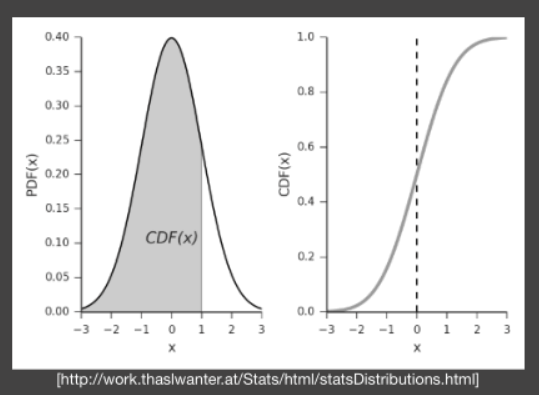
一种简单暴力的解法就是用C++的exf()函数打表求出CDF(depth)的数值解,然后查表,比较复杂。
但在RTR领域中,我们没必要去消耗大量算力求精确解,只需求近似解即可。为了求CDF(depth)的近似解,需要用到 切比雪夫不等式(Chebychev’s inquality):
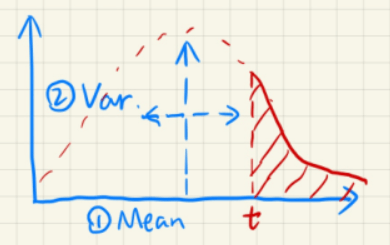
使用该不等式,就 不需要了解具体分布,在知道均值
那么
性能分析
- 生成SM:用双通道存储纹素的深度值和深度值的平方;用SAT求均值/用Mipmap求均值……
- 运行时:范围内深度值均值、均值的平方可由
求出,那么根据与切比雪夫不等式,CDF(depth)也可由 求出。 - 获得结果:用CDF(depth)可求出每个点的可见性。
用SAT求均值
思路
将区域内的深度值均值
- 遮挡物(z < depth)的深度值均值
,这是我们要求的 - 非遮挡物(z > depth)的深度值均值
,这是未知量
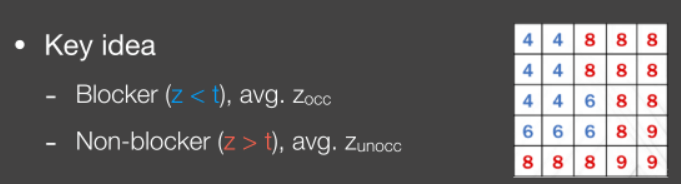
假设区域内非遮挡物纹素有
那么接下来只要知道
背后的算法
给定SM,如何快速求出在指定矩形范围内的深度值均值?
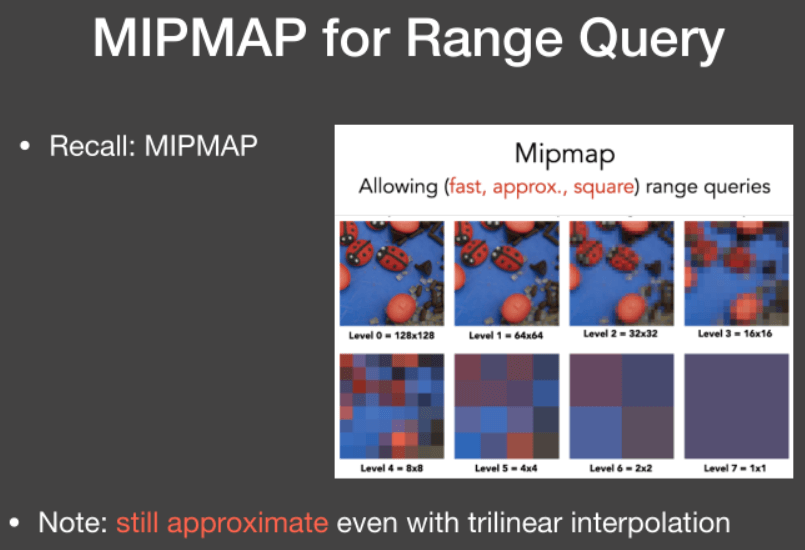
如果矩形是正方形,可以用Mipmap来进行范围查询:
![]()
它快速、近似地查询结果,由于结果可能是插值生成的,不是很精确。
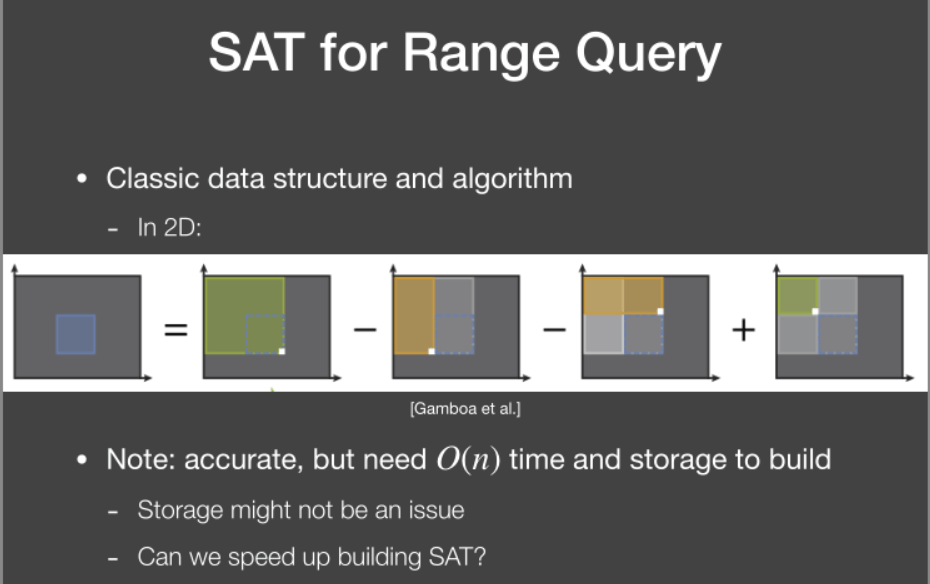
更通用的情况是使用SAT进行范围查询,它就是 二维前缀和:
![]()
但在构造前缀和时需要花费
时间,如何加速?行间/列间可以并行计算(GPU,CUDA……)
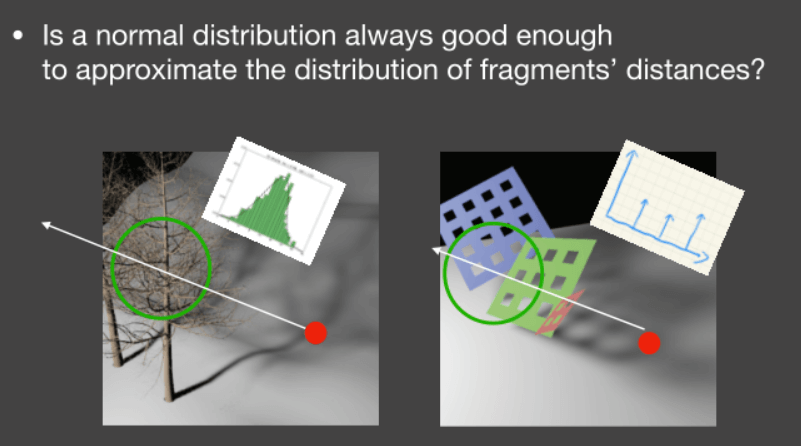
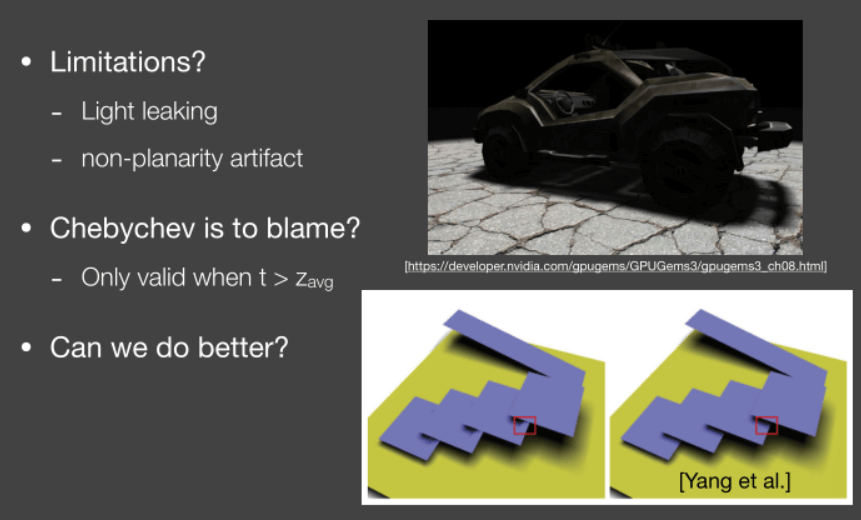
缺点
VSSM的缺点在于它没有使用具体的分布,当分布过于简单时,计算结果不正确(过亮/过暗)。
MSM
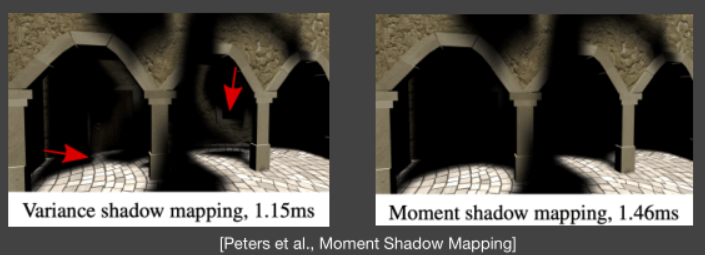
目标
相对于VSSM,使用一个更准确的分布去描述阴影,并且消耗的存储量也不大。
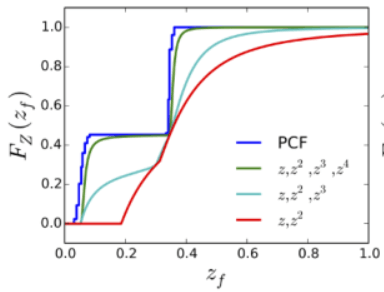
思路
使用高阶的矩(moment)去描述分布,一般4阶矩就够用。
矩:就是某数的n次方,例如VSSM就只用了前2阶。
优缺点
优点:效果很好。
缺点:存储量大,性能较差(用4阶矩重建CDF)。
参考资料
- GAMES202: 高质量实时渲染 (ucsb.edu)