01 - 复习ShadowMap
本文复习一下Shadow Map是怎么做的,它的问题与解决方法,以及他背后的数学。
简要回顾
首先对在GAMES101学过的Shadow Map
是两个Pass的算法
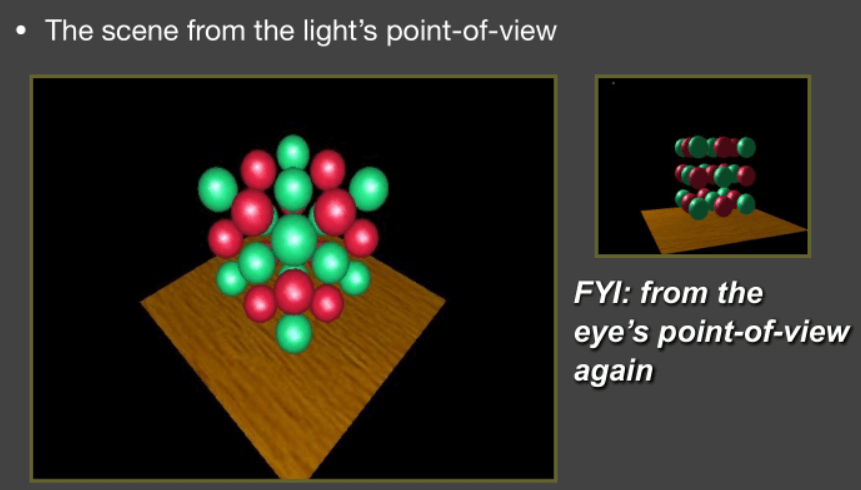
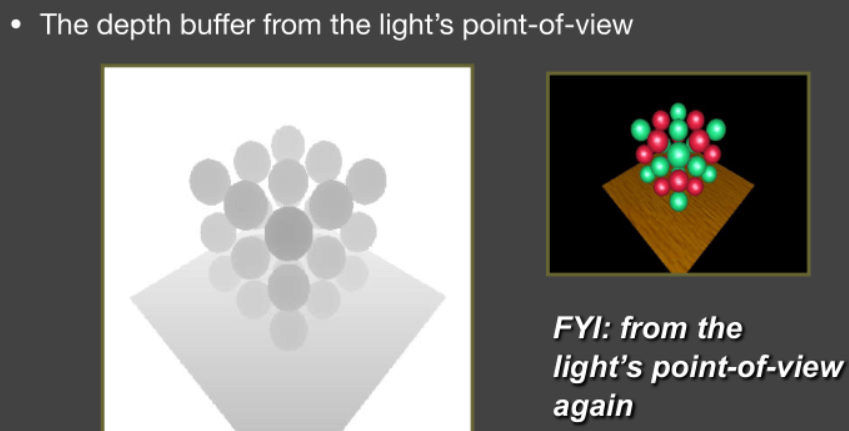
从光源看向物体,生成它的SM(Shadow Map)
![从光源看向物体]()
![生成Shadow Map]()
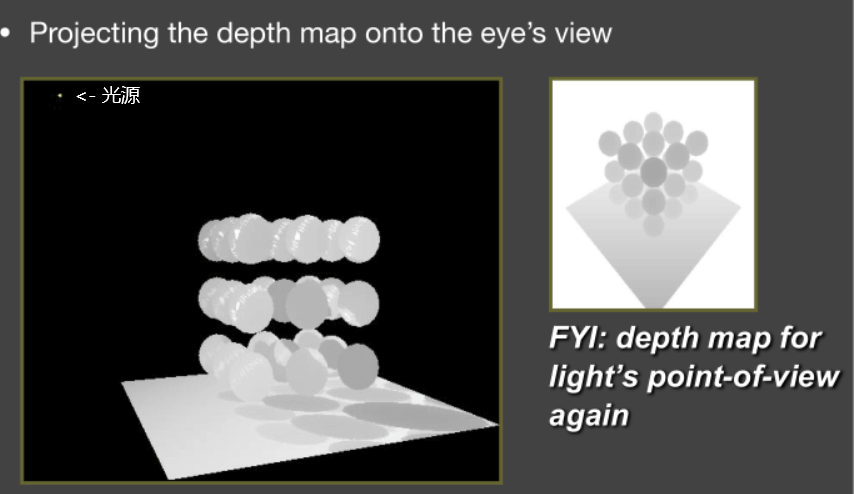
从摄像机看向物体,使用之前生成的SM做比对,在确定是阴影的地方生成阴影。
![]()
是图像空间的算法
优点:要得到阴影仅需SM,而不需要场景中物体的几何信息。
缺点:有自遮挡和走样问题。
存在的问题
自遮挡现象(Self Occlusion)
Shadow Map会出现自遮挡现象,由数值精度问题造成。
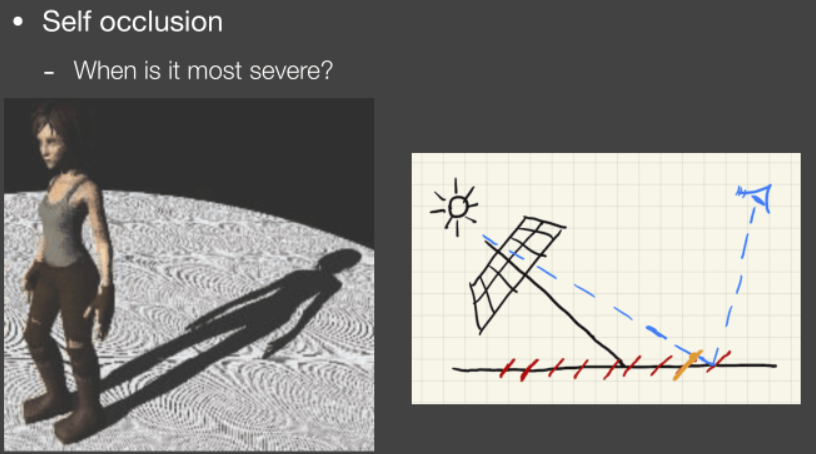
如图,在SM中,每个纹素记录一个深度值,它不是连续的,导致当我们看向某物体,结果应该是蓝红交点,但被前面的黄蓝交点挡住了,产生自遮挡现象。
可以通过 添加偏移量(bias) 的方法解决该问题,并且该偏移量可随光源与地板的角度变化(越垂直越小)。
阴影悬浮(Detached Shadow)
引入偏移量后,发生“阴影悬浮”问题,也称彼得潘问题。
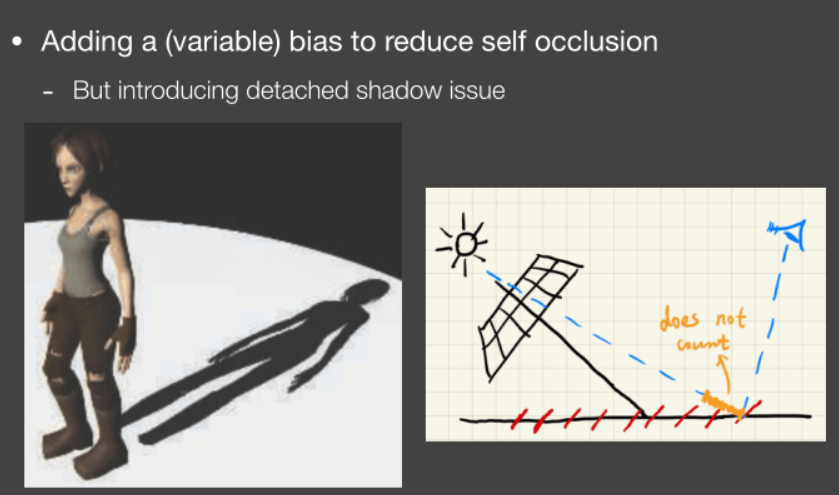
由于偏移量过大,导致一些本来是阴影的像素点变得不再是阴影。解决方法有许多,这里介绍一下工业界和学术界是怎么解决的:
工业界:挑一个合适的偏移值;采用正面剔除,降低物体深度以减小偏移值的影响。
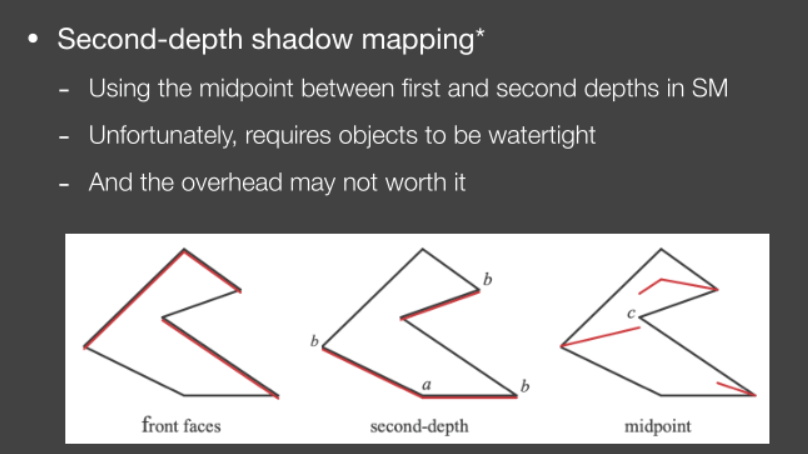
学术界:使用次小的SM(second-depth SM)。
![]()
如图,进行两次SM的Pass,记录遮挡物最小和次小的深度值,然后去中位数参与后续过程。这个方法的缺点是,要求物体必须是有厚度的(watertight),而且运算速度较慢。
走样问题
使用SM生成的阴影还会有走样问题,阴影的精细程度受SM贴图的分辨率限制。
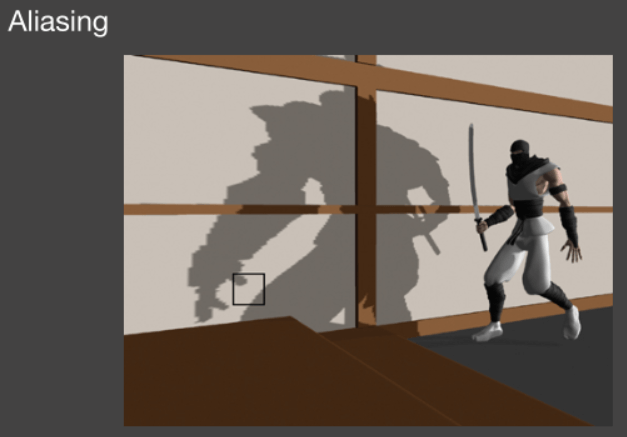
可以使用Cascade SM,PCF等方法缓解走样问题。
背后的数学
在RTR领域中,常拿不等式作为“约等式”使用。因为RTR领域中更关心近似相等:
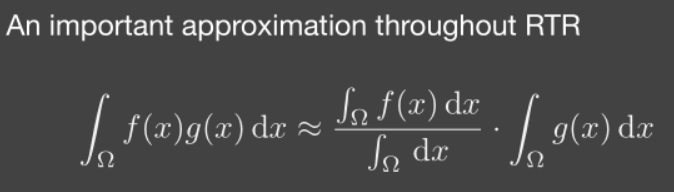
其中,那个分母是归一化常数。当 积分范围较小或被积函数足够光滑 时,近似值更准确。
在SM中的应用
首先回顾渲染方程,在RTR领域中的渲染方程如下:

分为间接光,BRDF和可见性三部分。这里使用上边的约等式,将 可见性和剩余两部分分离出来:

现在就有可见性和着色结果两部分了,这正是SM所做的事,根据可见性决定是否有着色结果。
什么时候用更准确?
积分范围较小时(即平行光,点光源) - 着色结果足够光滑时(diffuse BSDF,光源平滑)
参考资料
- GAMES202: 高质量实时渲染 (ucsb.edu)