04 - 变换(二维与三维)
齐次坐标(Homogeneous Coordinate)
给点和向量的描述升一维(
- 二维中的点:
- 二维中的向量:
这里理解一下为什么点的
在三维中
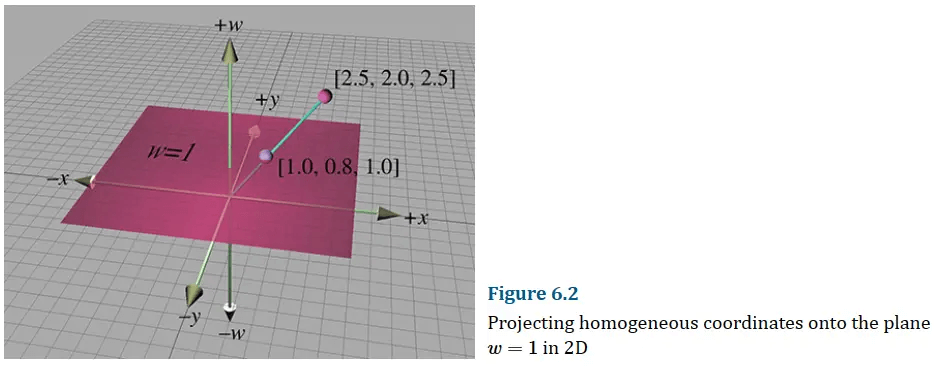
对于任何给定的二维点
当
并且根据w的特性,可以快速判别两个点/向量的关系:
- 向量+向量=向量 (0+0=0)
- 点-点=向量(1-1=0)
- 点+向量=点(1+0=1)
- 点+点=中点(1+1=2 表示点
)
线性变换(Linear)
形如
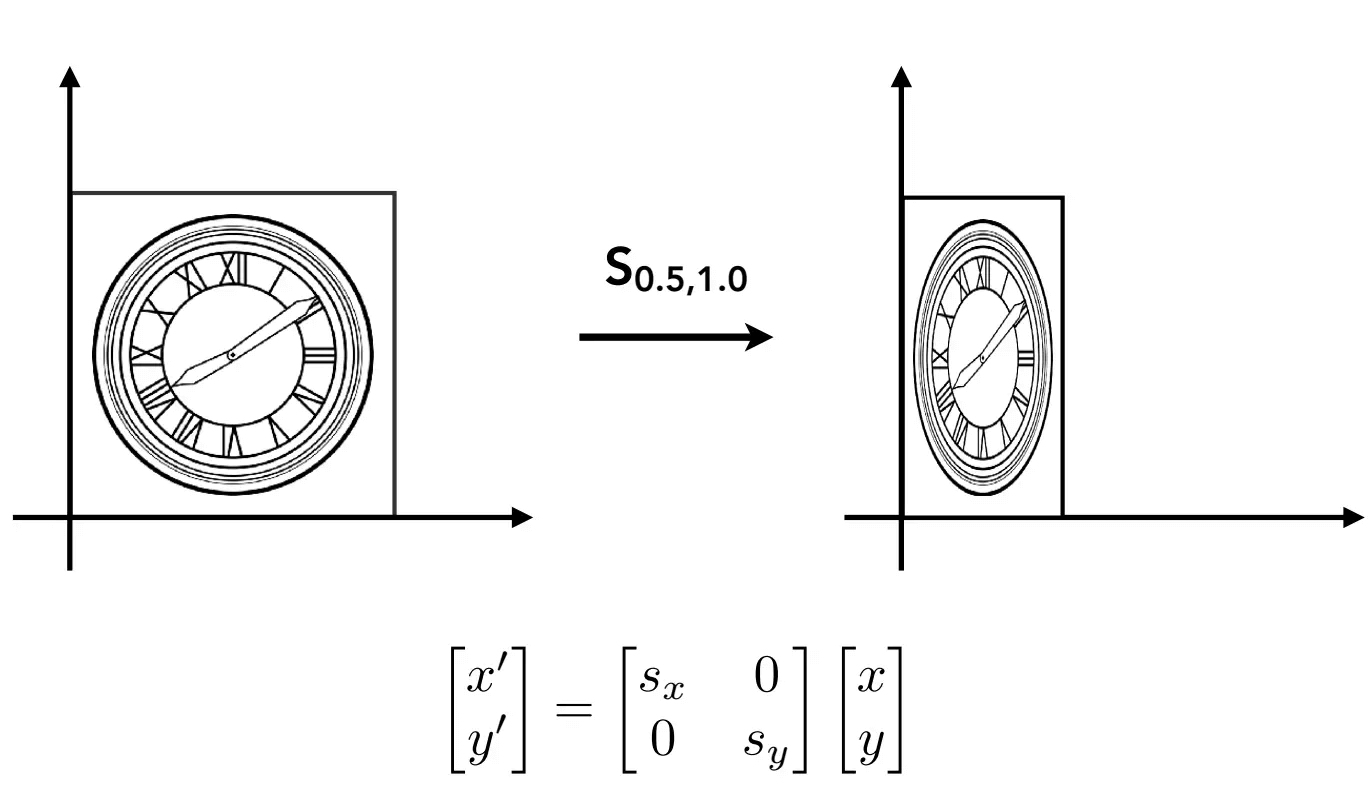
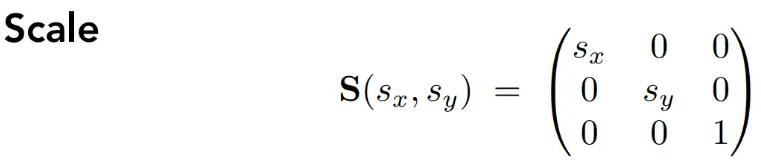
缩放(Scale)
二维
首先是沿主轴方向的缩放:
然后是沿任意方向的缩放,该矩阵将在由单位向量
如果需要引入齐次坐标,简单升维即可:
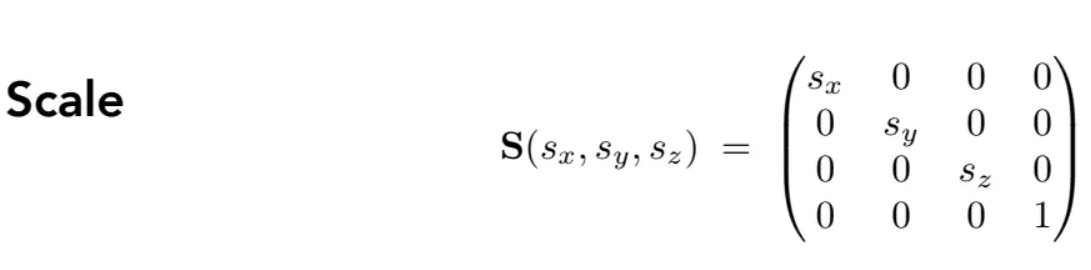
三维
首先是沿主轴方向的缩放,引入齐次坐标:
然后是沿任意方向的缩放:
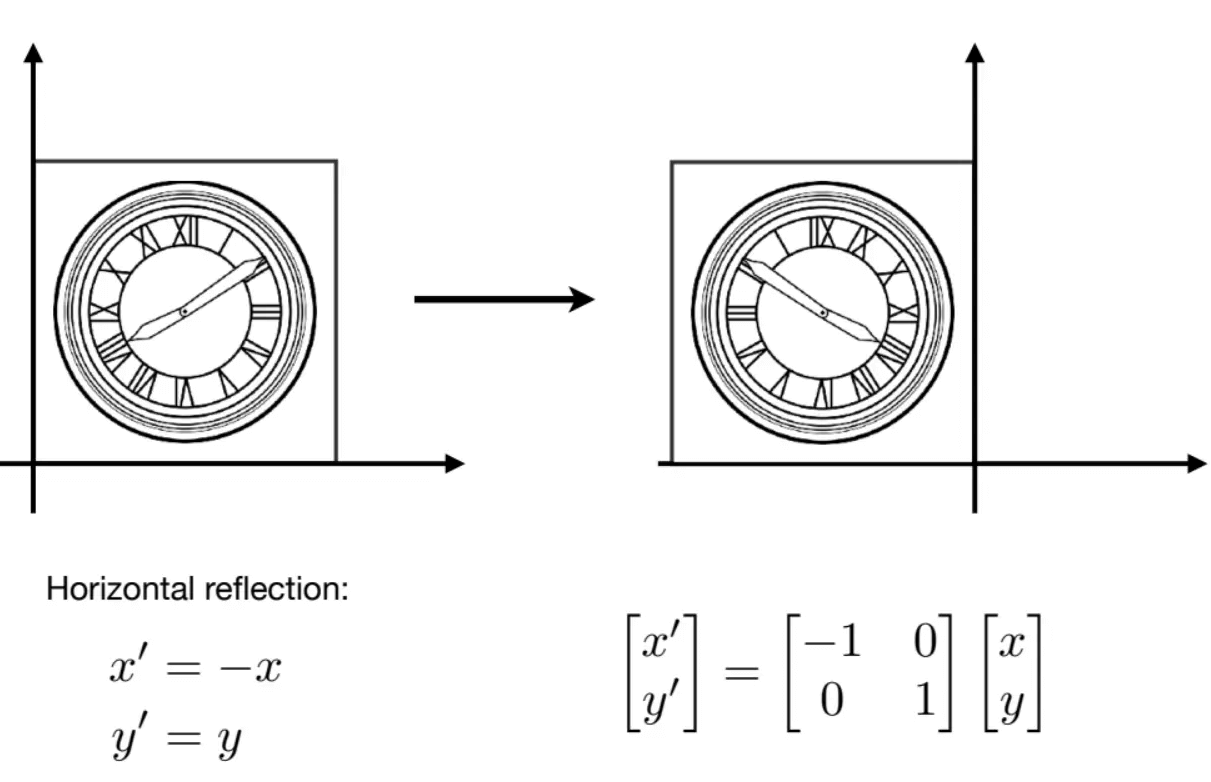
反射(Reflection)
二维
反射,也被称为镜像(Mirroring),是一种围绕直线(二维)或平面(三维)中”翻转“对象的变换。
在二维中,可以通过应用-1的比例因子来完成反射。设
三维
同理,三维中,
错切(Shear)
二维
错切是一种”倾斜“坐标空间的变形,它将不均匀地拉伸坐标空间,不保留角度,但保留了面积/体积。其基本思路是将一个坐标的倍数添加到另一个坐标上。
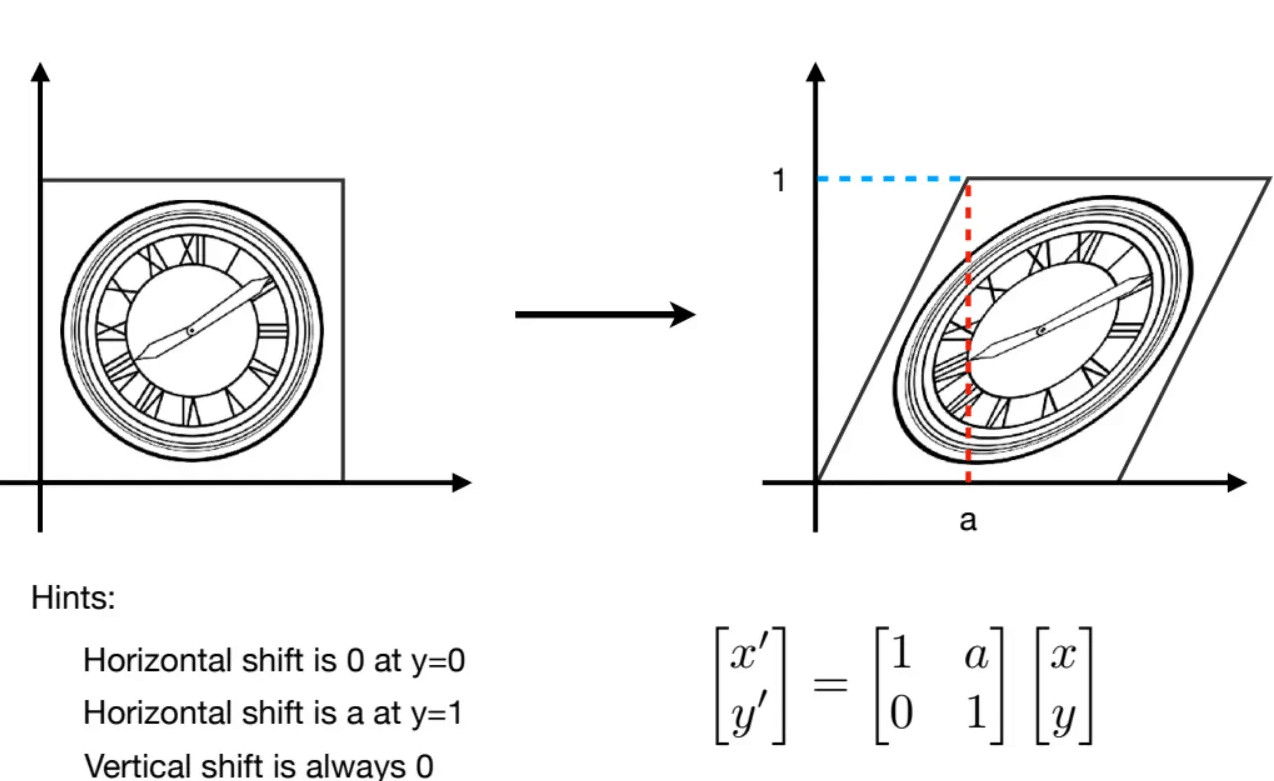
y方向上的同理。
三维
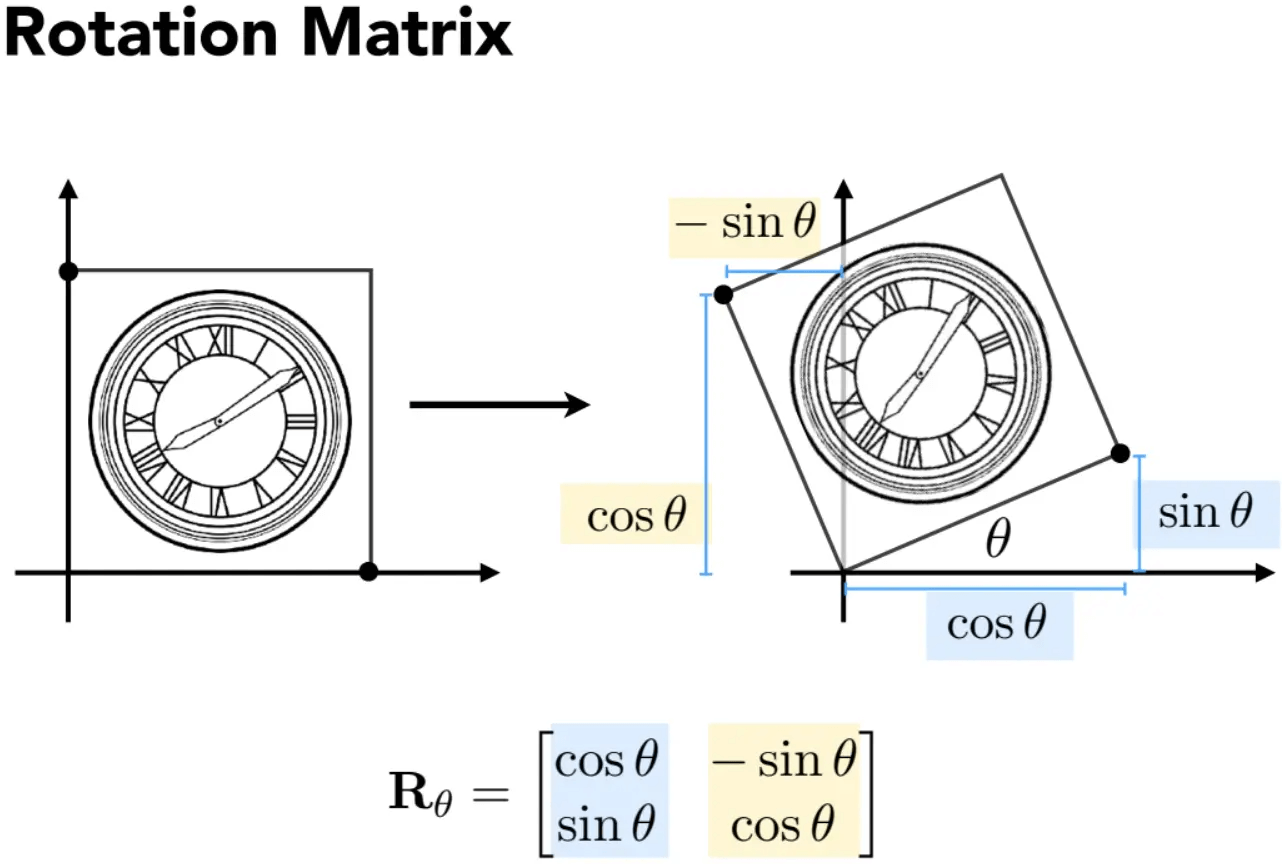
旋转(Rotate)
二维
在二维中,只能进行绕某点旋转的变换。以绕原点,逆时针旋转为默认,矩阵如下:
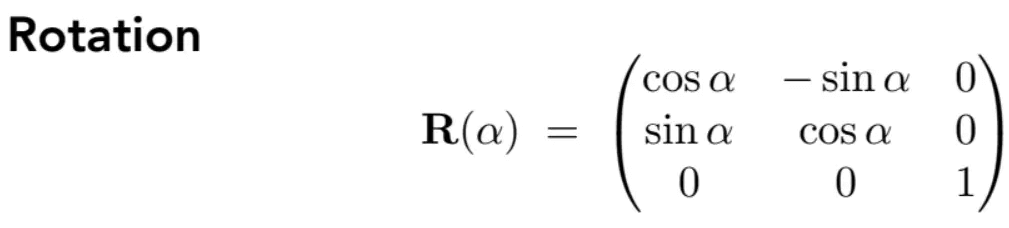
引入齐次坐标系:
三维
矩阵
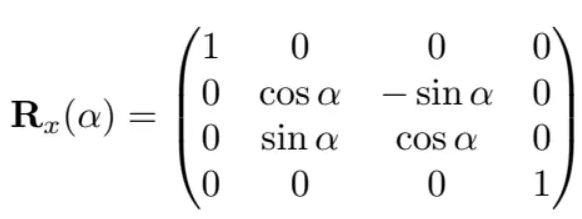
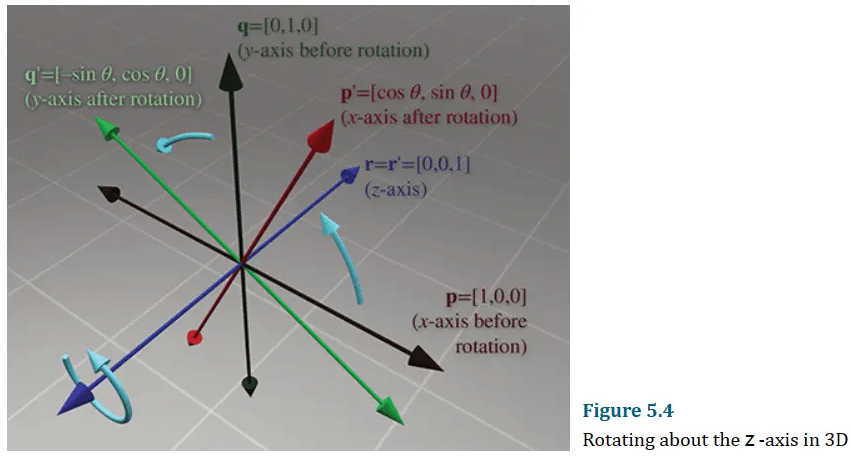
考虑如何分别绕三个坐标轴旋转,首先是绕x轴旋转:
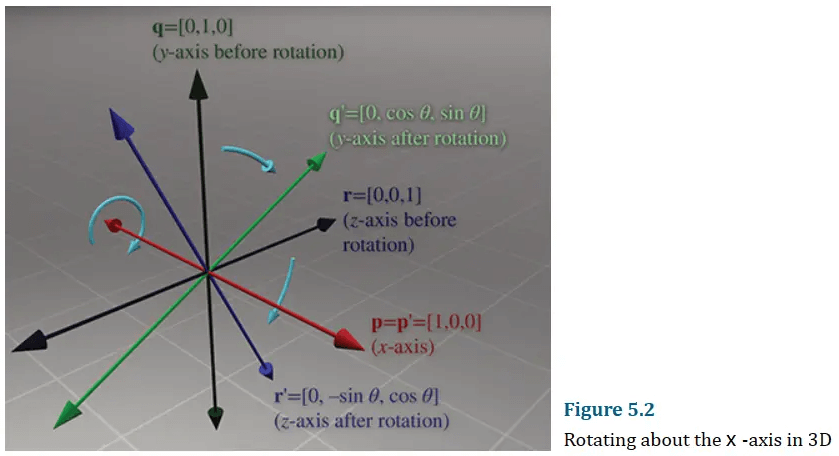
前面的文章说过,矩阵其实是向量的数组,因此我们可以用三个轴的方向向量来表示一个旋转矩阵。按照上图描述,基本旋转矩阵为:
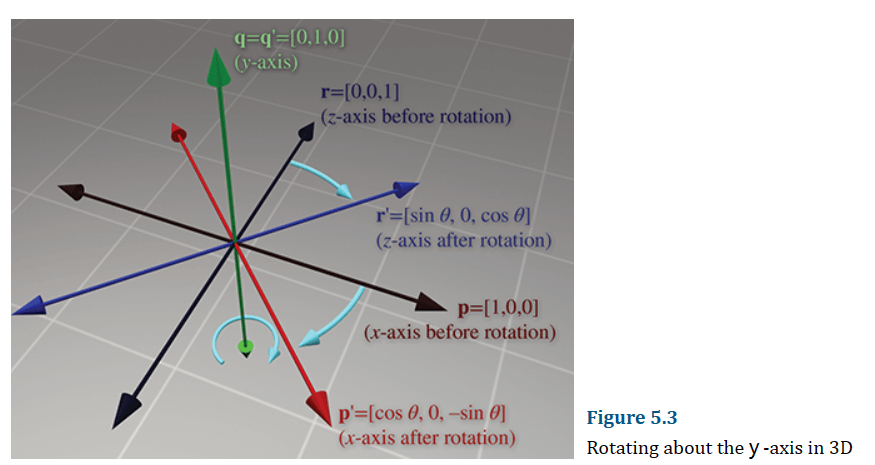
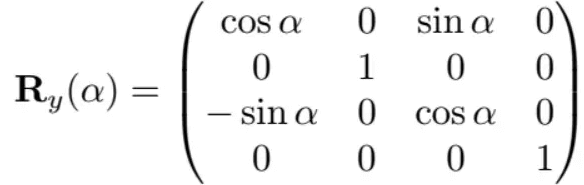
类似的,绕y轴旋转为:
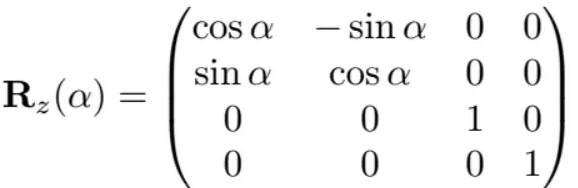
绕z轴旋转为:
如果想要绕任意方向进行旋转,可以使用罗德里格斯旋转公式:
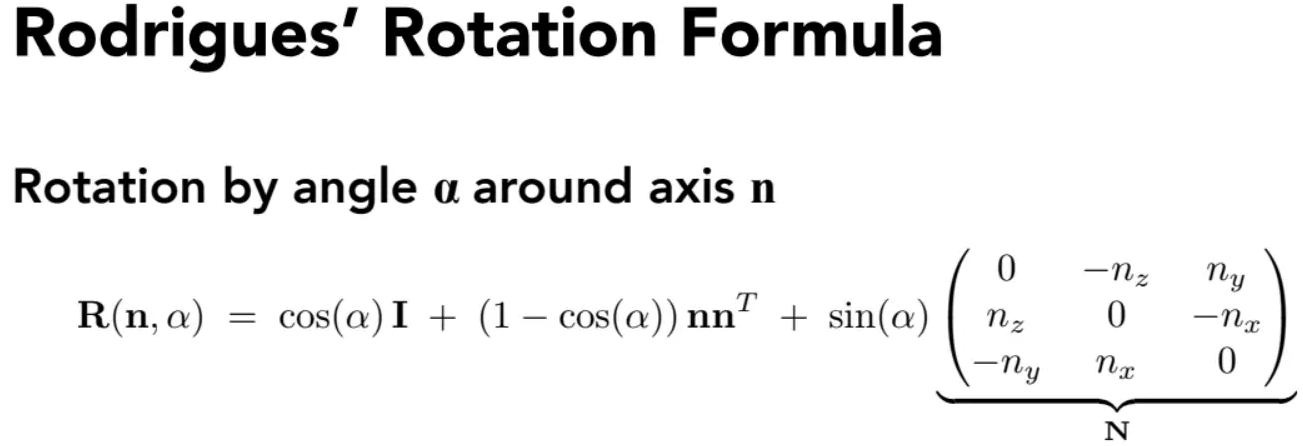
其中,n为旋转轴,用向量表示;
欧拉角
三维旋转也能通过使用欧拉角/四元数来表示,这里先看欧拉角。
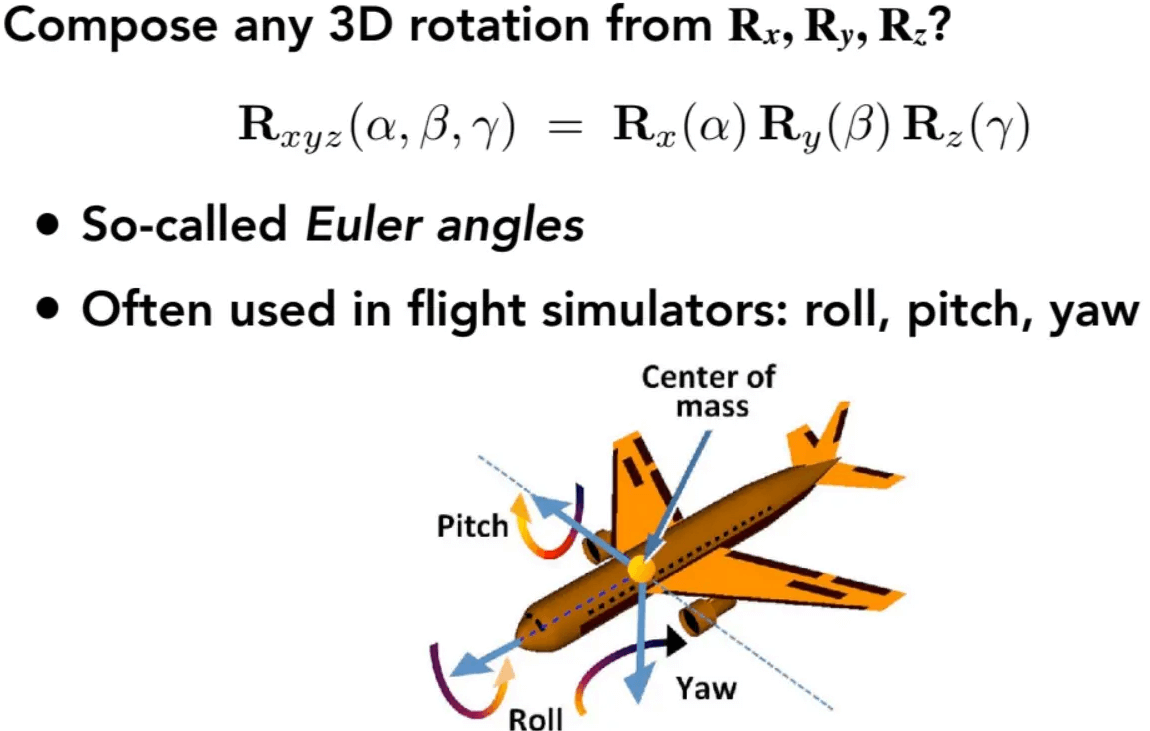
如上图所示,只需将3个绕轴旋转的矩阵结合起来就行了,这三个角在欧拉角中被称为偏航角(Yaw),翻滚角(Roll),俯仰角(Pitch)。
通常情况下,只会选择一个固定的顺序进行旋转,而这会导致万向锁(Gimbal Lock)发生。例如以ZYX顺序进行旋转,首先绕z旋转
万向锁没有简单的解决方案,如果在使用欧拉角的过程中发生了万向锁,那么它们之间的插值可能会变得很怪异或摇摆不定,也就是产生“抖动”。
四元数
有关四元数的基础知识在这里。
定义相关元素如下:
表示3D中的一个点 ,其中 是要旋转的角度, 是单位矢量旋转轴。这是通过轴-角系统的视角从而定义成这样的。
那么,
仿射变换(Affine)
线性变换+平移变换。
平移变换(Translation)
二维
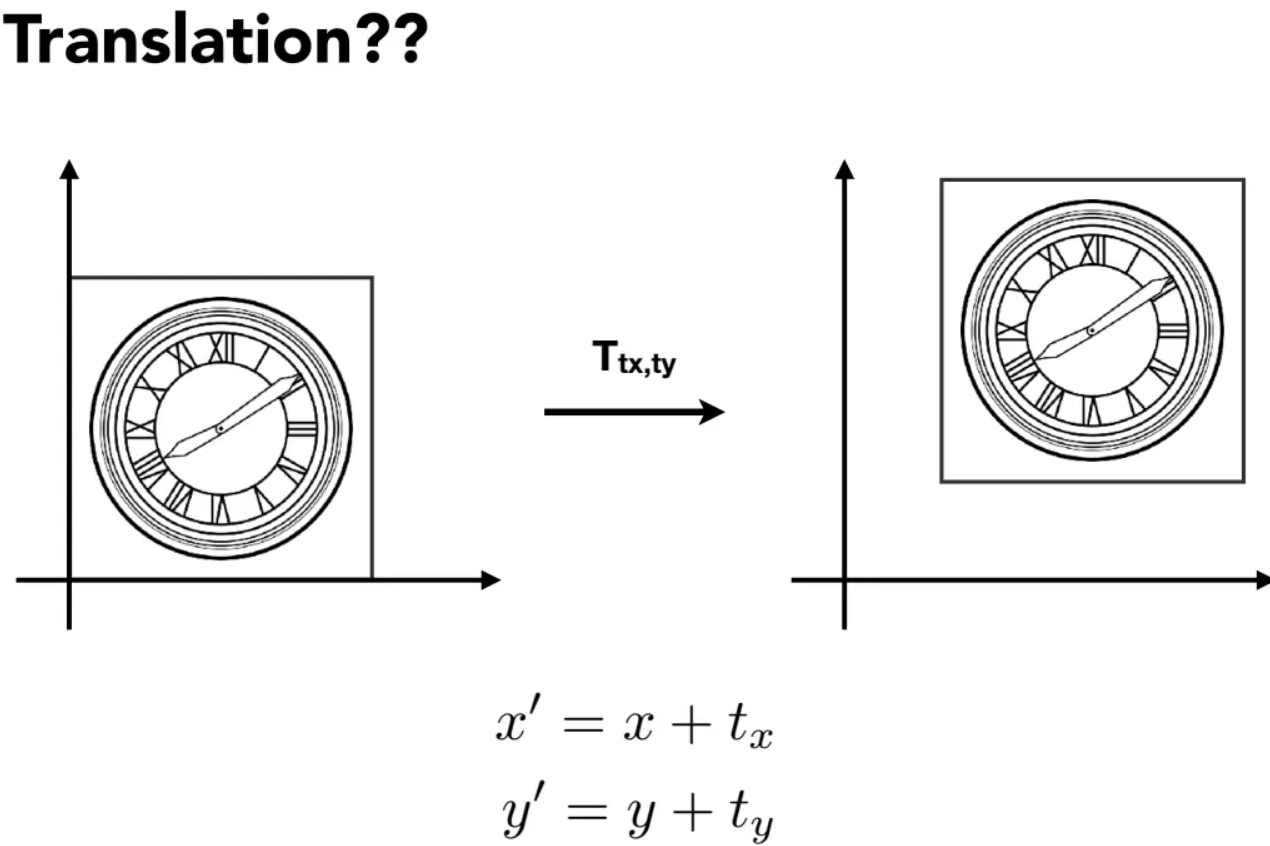
矩阵形式如下:
显然,这种变换写不成线性变换的形式,因为它后边还有加法。我们不想让平移变换成为特例,于是引入齐次坐标,这样,平移就能写成”线性变换“的形式:
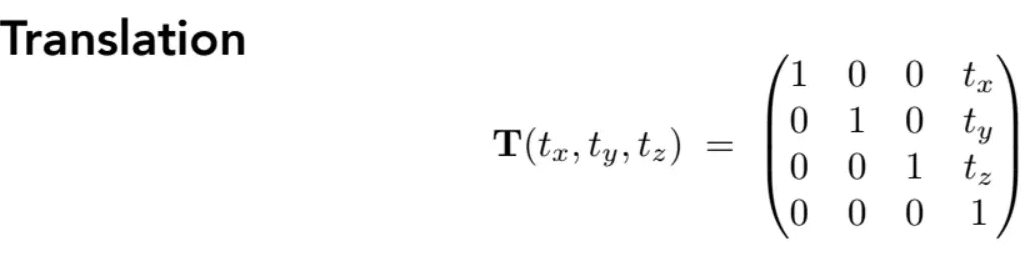
三维
引入齐次坐标系:
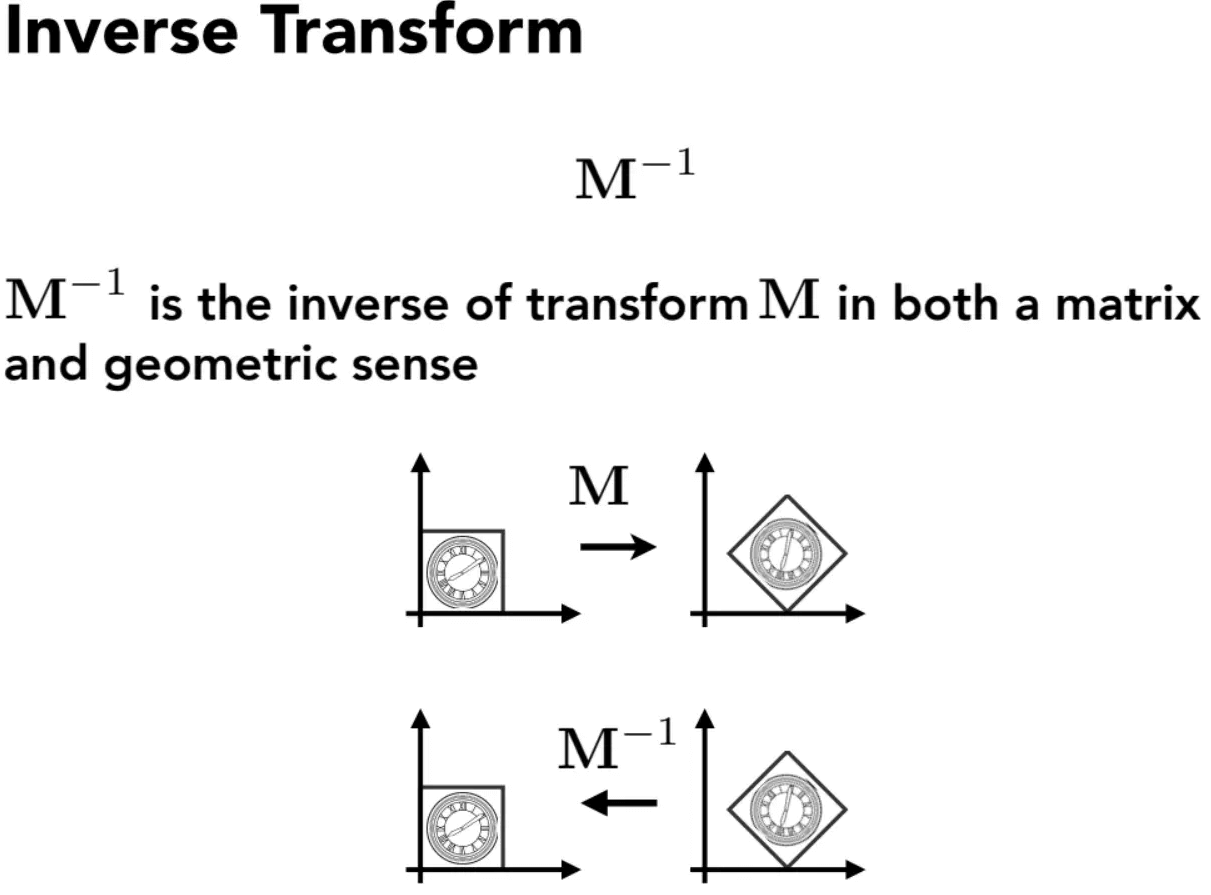
可逆变换(Invertible)
除了投影之外的所有原始变换都是可逆的。
组合变换
顾名思义,就是将上边一堆原始变换组合起来。
例如:
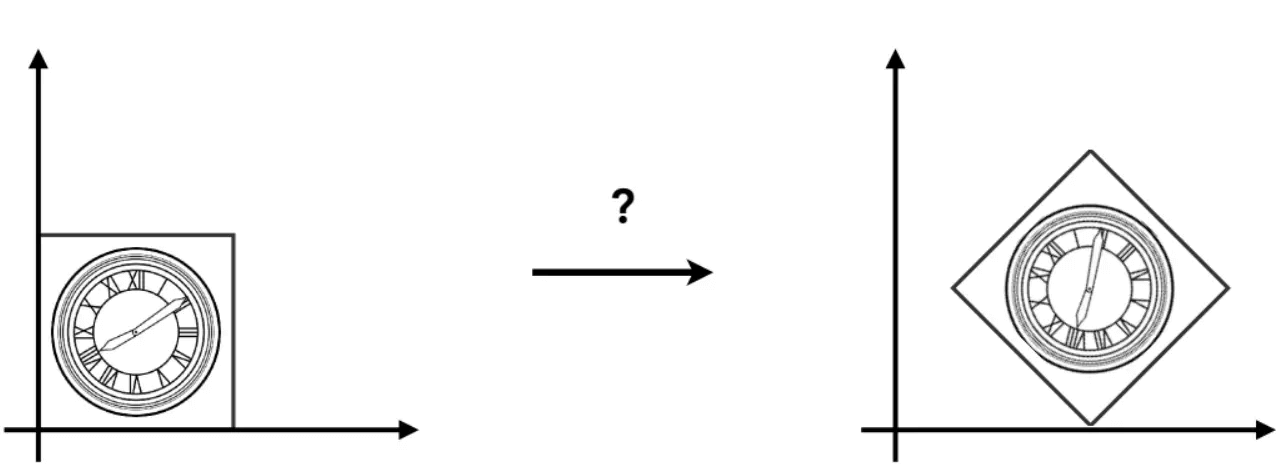
可以先绕原点旋转45°,然后平移过去 (注意变换的次序是重要的,颠倒过来再组合可能不是同一种变换了):
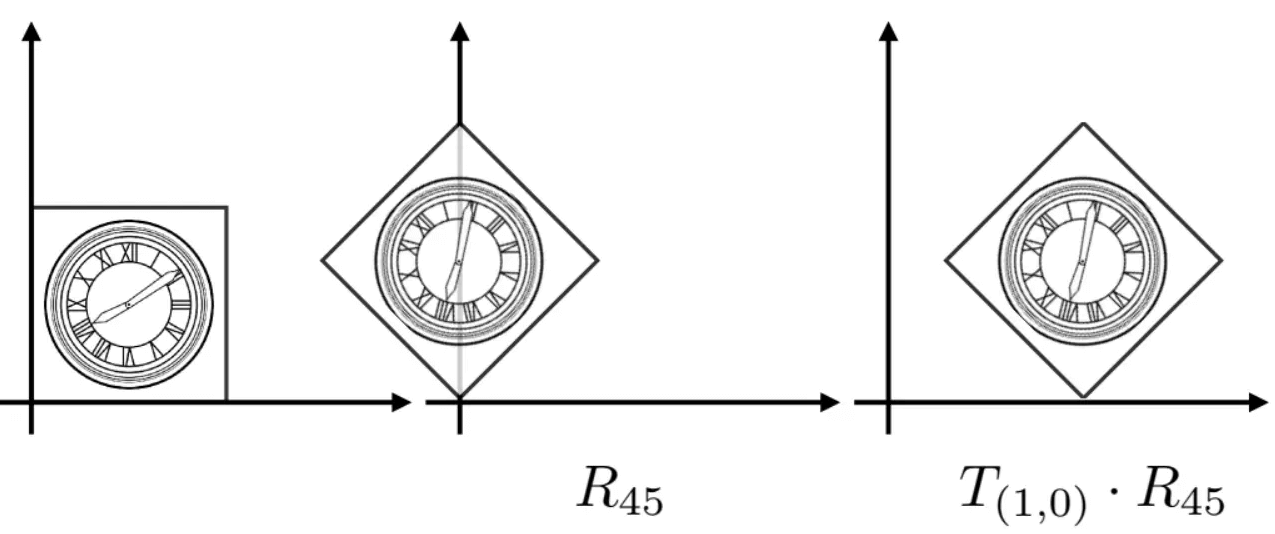
并且注意到,用列向量描述的前提下,矩阵是从右往左乘的:
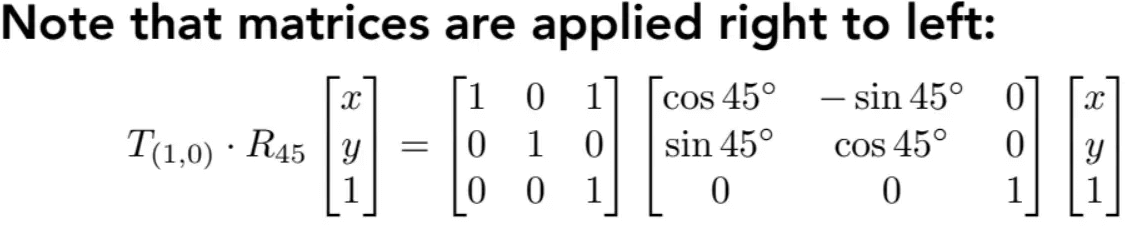
为了计算简便,可以提前把这些变换矩阵给乘到一起。
参考资料
- GAMES101-现代计算机图形学入门
- 3D数学基础 图形和游戏开发(第2版)
- 万向锁.pdf
- 四元数.pdf
- Release Fall 2023 Lab Docs · XJTU-Graphics/Dandelion-docs (github.com)