8 - 余生的光追Part1
开始学习大名鼎鼎的光追三部曲系列中的:Ray Tracing: The Rest of Your Life!希望我能坚持下去吧。
简单蒙特卡洛程序
接下来从一个最简单的蒙特卡洛程序开始。有两种随机算法:蒙特卡洛算法和拉斯维加斯算法。
一个随机算法会在计算中产生一些随机量。对于拉斯维加斯算法,它总是可能给出正确的结果(有时候是错的)。但对于光线追踪这种极其复杂的问题,我们可能不会把问题答案的合理性放到最优先。拉斯维加斯算法最终会得到正解,但无法保证花费的时间有多长。一个拉斯维加斯算法的经典例子就是快速排序算法,它总是以一个排列好的数组结束,但需要随机时间完成。另一个例子就是我们之前写的在单位球中随机采样:
inline Vec3 random_in_unit_sphere() {
while (true) {
auto p = Vec3::random(-1,1);
if (p.length_squared() < 1)
return p;
}
}这个代码最终会返回单位球内的随机向量,但无法保证花费了多长时间。
蒙特卡洛算法将会给出一个统计估计的答案,且这种估计会随着程序运行时间越来越精准。这说明当我们认为答案差不多对的时候,就能退出程序了。答案可能会有点噪音,不过够用了。
估计Pi
蒙特卡洛算法的范例就是估计
假设有一个包在正方形里的圆:
现在假设你从正方形里随机选一些点,在圆里的点 / 总点数 应该和圆的面积成正比如下:
std::cout << std::fixed << std::setprecision(12);
int inside_circle = 0;
int N = 100000;
for (int i = 0; i < N; ++i)
{
auto x = random_double(-1, 1);
auto y = random_double(-1, 1);
if (x * x + y * y < 1)
inside_circle++;
}
std::cout << "Pi: " << (4.0 * inside_circle) / N << '\n';
// 结果:
Pi: 3.140840000000展示收敛性
如果让程序一直运行,只是在适当情况下输出估计值:
std::cout << std::fixed << std::setprecision(12);
int inside_circle = 0;
int runs = 0;
while (true)
{
++runs;
auto x = random_double(-1, 1);
auto y = random_double(-1, 1);
if (x * x + y * y < 1)
inside_circle++;
if (runs % 100000 == 0)
std::cout << "Estimate of Pi: " << (4.0 * inside_circle) / runs << '\n';
}分层抖动采样
可以发现上面的结果已经很接近
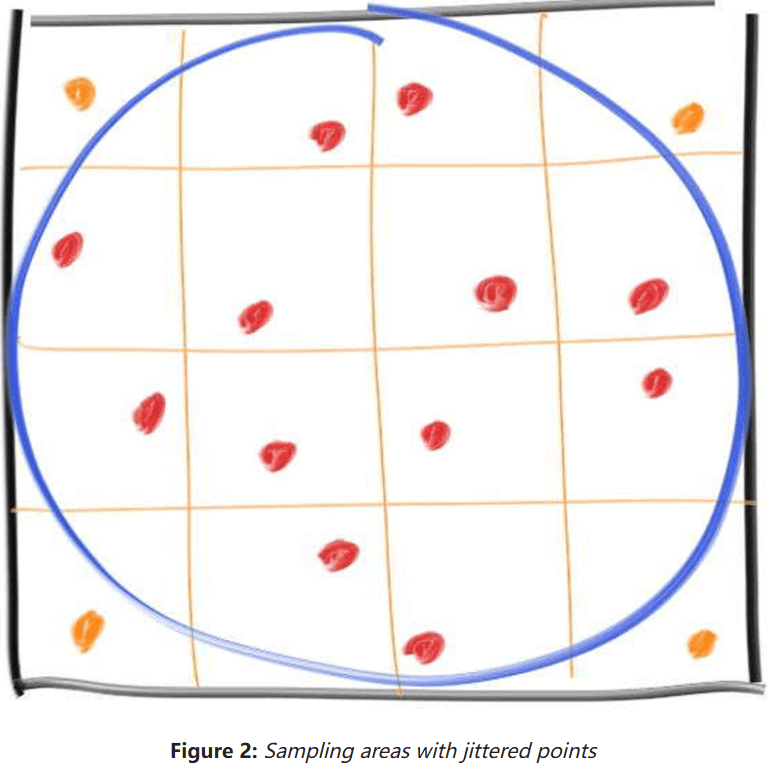
让我们试试分层抖动采样和纯随机采样,采样一百万次:
std::cout << std::fixed << std::setprecision(12);
int inside_circle = 0;
int inside_circle_stratified = 0;
int sqrt_N = 1000;
for (int i = 0; i < sqrt_N; ++i)
{
for (int j = 0; j < sqrt_N; ++j)
{
// 随机采样
auto x = random_double(-1, 1);
auto y = random_double(-1, 1);
if (x * x + y * y < 1)
inside_circle++;
// 分层抖动采样
x = 2 * ((i + random_double()) / sqrt_N) - 1;
y = 2 * ((j + random_double()) / sqrt_N) - 1;
if (x * x + y * y < 1)
inside_circle_stratified++;
}
}
std::cout << "Regular Estimate of Pi: " << (4.0 * inside_circle) / (sqrt_N * sqrt_N) << '\n'
<< "Stratified Estimate of Pi: " << (4.0 * inside_circle_stratified) / (sqrt_N * sqrt_N) << '\n';输出结果如下:
Regular Estimate of Pi: 3.141168000000
Stratified Estimate of Pi: 3.141404000000可以发现分层抖动抽样的结果比常规随机抽样的好。但它的优势随着采样维度的增加而减弱,这就是所谓的维数灾难。光线追踪是一个很高维的算法,每次反射都会添加两个维度:
接下来对康奈尔盒场景进行分层抖动采样,首先先跑一遍原来的场景做对比用:
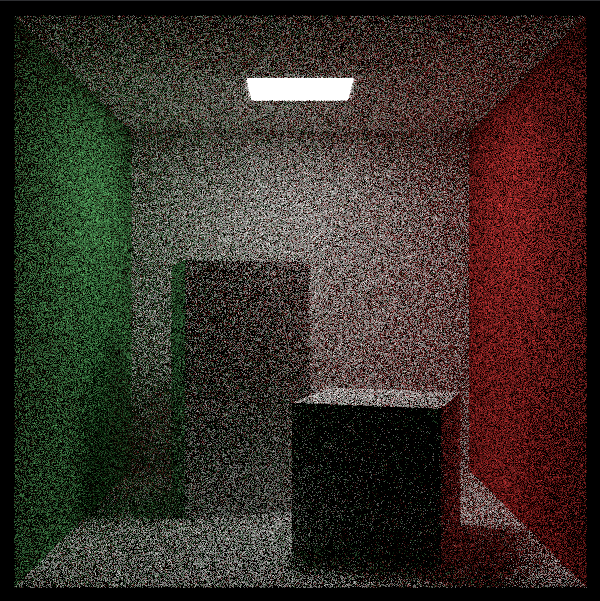
接下来在Camera类中实现分层抖动采样:
参考资料
- Ray Tracing: The Rest of Your Life