3 - 一个周末搞定光追Part3
开始学习大名鼎鼎的光追三部曲系列中的:Ray Tracing in One Weekend!希望我能坚持下去吧。
升级相机类
接下来开始升级相机类,让它支持Fov。由于我们的图片不是正方形,水平和垂直两方向fov不一样。这里使用垂直的fov。
支持fov
首先,光线从摄像机原点射向z=-1平面会保留。接下来看看垂直fov的样式:
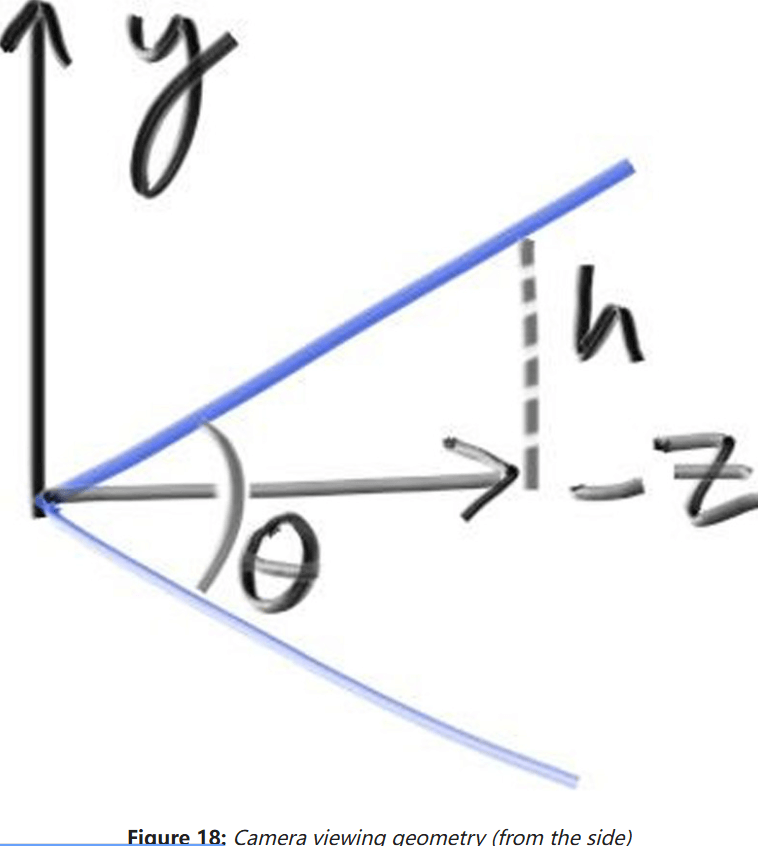
给定垂直视角fovCamara类如下:
class Camera
{
public:
double aspectRadio = 1.0; // 图像的宽高比
int imgWidth = 100; // 图像宽度
int samples_per_pixel = 10; // 每像素采样数, 即SPP
int max_depth = 10; // 光线的最大弹射次数
double vfov = 90; // 垂直fov
void render(const Hittable& world) {...}
private:
...
void initialize()
{
imgHeight = static_cast<int>(imgWidth / aspectRadio);
imgHeight = (imgHeight < 1) ? 1 : imgHeight; // 确保高度至少为1
center = Point3(0, 0, 0);
pixel_sample_scale = 1.0 / samples_per_pixel;
// 视口设定
double focalLength = 1.0; // 焦距
double theta = degrees_to_radians(vfov);
double h = std::tan(theta / 2);
double viewportHeight = 2 * h * focalLength;
double viewportWidth = viewportHeight * static_cast<double>(imgWidth) / imgHeight;
...
}
...
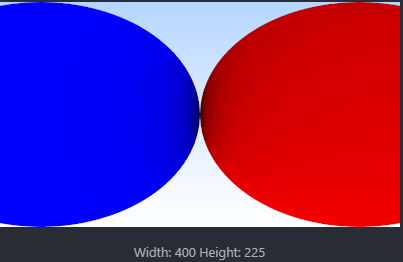
};然后用两个相切的球的场景测试一下vfov为90°的情况:
int main()
{
const double R = std::cos(pi / 4);
// 材质设定
auto material_left = make_shared<Lambertian>(Color(0, 0, 1));
auto material_right = make_shared<Lambertian>(Color(1, 0, 0));
// 场景设定
HittableList world;
world.add(make_shared<Sphere>(Point3(-R, 0, -1), R, material_left));
world.add(make_shared<Sphere>(Point3(R, 0, -1), R, material_right));
// 初始化摄像机, 然后渲染
Camera cam;
cam.aspectRadio = 16.0 / 9.0;
cam.imgWidth = 400;
cam.samples_per_pixel = 100;
cam.max_depth = 50;
cam.vfov = 90;
cam.render(world);
return 0;
}结果如下:
支持位置和朝向
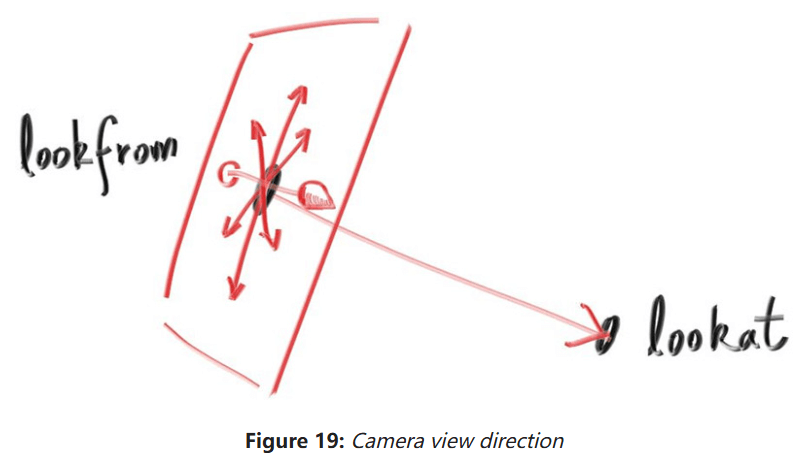
如图,lookfrom是摄像机的位置,lookat是摄像机看向的地方。此外还需要一个up向量定义摄像机的正上方,如下图:
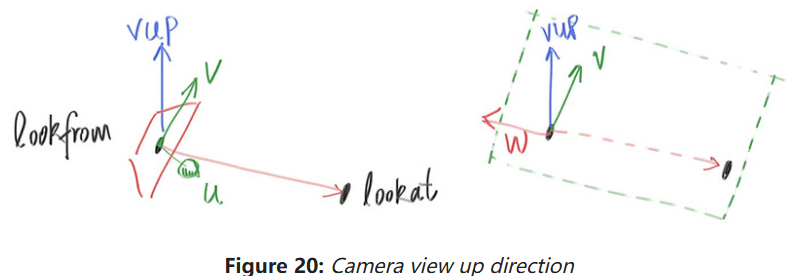
要想得到摄像机的up向量(图中的u),就要先找一个始终保持向上的向量,如世界坐标系的vup,然后经过若干叉乘和标准化后得到相机坐标系(u, v, w)。其中,u将是指向相机正右方向的单位向量;v将是指向相机正上方的单位向量;w则是指向lookat的单位向量。
首先在Camara类中编写相机的初始状态,它应该面向-z轴:
class Camera
{
public:
double aspectRadio = 1.0; // 图像的宽高比
int imgWidth = 100; // 图像宽度
int samples_per_pixel = 10; // 每像素采样数, 即SPP
int max_depth = 10; // 光线的最大弹射次数
double vfov = 90; // 垂直fov
Point3 lookFrom = Point3(0, 0, 0); // 相机本体位置
Point3 lookAt = Point3(0, 0, -1); // 相机看向的位置
Vec3 vup = Vec3(0, 1, 0); // 指向相机正上方的单位向量
...
private:
int imgHeight; // 图像高度
double pixel_sample_scale; // spp / 1
Point3 center; // 相机位置
Point3 pixel00_pos; // 像素(0, 0)的位置
Vec3 pixel_delta_u; // 定位像素用的辅助向量
Vec3 pixel_delta_v;
Vec3 u, v, w; // 相机空间的三个坐标轴
void initialize()
{
imgHeight = static_cast<int>(imgWidth / aspectRadio);
imgHeight = (imgHeight < 1) ? 1 : imgHeight; // 确保高度至少为1
center = lookFrom;
pixel_sample_scale = 1.0 / samples_per_pixel;
// 视口设定
double focalLength = (lookFrom - lookAt).length(); // 焦距
double theta = degrees_to_radians(vfov);
double h = std::tan(theta / 2);
double viewportHeight = 2 * h * focalLength;
double viewportWidth = viewportHeight * static_cast<double>(imgWidth) / imgHeight;
// 相机坐标系初始化
w = unitVector(lookFrom - lookAt);
u = unitVector(cross(vup, w));
v = cross(w, u);
// 4个辅助向量
Vec3 viewport_u = viewportWidth * u;
Vec3 viewport_v = viewportHeight * -v;
pixel_delta_u = viewport_u / imgWidth;
pixel_delta_v = viewport_v / imgHeight;
// 计算第一个像素位置
Point3 viewport_upper_left = center - (focalLength * w) - viewport_u / 2 - viewport_v / 2;
pixel00_pos = viewport_upper_left + 0.5 * (pixel_delta_u + pixel_delta_v);
}
...
};然后切换回之前的场景,并修改相机位置和朝向:
int main()
{
// 材质设定
auto material_ground = make_shared<Lambertian>(Color(0.8, 0.8, 0.0));
auto material_center = make_shared<Lambertian>(Color(0.1, 0.2, 0.5));
auto material_left = make_shared<Dielectric>(1.50);
auto material_bubble = make_shared<Dielectric>(1.00 / 1.50);
auto material_right = make_shared<Metal>(Color(0.8, 0.6, 0.2), 1.0);
// 场景设定
HittableList world;
world.add(make_shared<Sphere>(Point3(0.0, -100.5, -1.0), 100.0, material_ground));
world.add(make_shared<Sphere>(Point3(0.0, 0.0, -1.2), 0.5, material_center));
world.add(make_shared<Sphere>(Point3(-1.0, 0.0, -1.0), 0.5, material_left));
world.add(make_shared<Sphere>(Point3(-1.0, 0.0, -1.0), 0.4, material_bubble));
world.add(make_shared<Sphere>(Point3(1.0, 0.0, -1.0), 0.5, material_right));
// 初始化摄像机, 然后渲染
Camera cam;
cam.aspectRadio = 16.0 / 9.0;
cam.imgWidth = 400;
cam.samples_per_pixel = 100;
cam.max_depth = 50;
cam.vfov = 90;
cam.lookFrom = Point3(-2, 2, 1);
cam.lookAt = Point3(0, 0, -1);
cam.vup = Vec3(0, 1, 0);
cam.render(world);
return 0;
}结果如下:
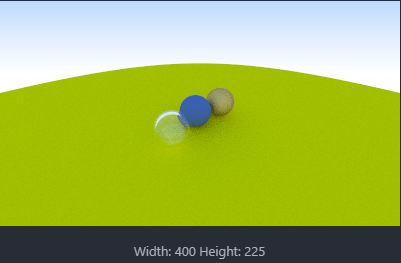
缩小vfov可达到放大的效果,例如vfov为20时,渲染结果如下:
散焦模糊
接下来实现本书最后一个特性:散焦模糊(Defocus Blur),和景深(depth of field)不一样。对于真实的相机,可以通过增大光圈造成散焦模糊。而在这里我们只需添加一个“透镜”即可实现散焦模糊。
薄透镜近似
可以用薄透镜近似模拟真实相机:
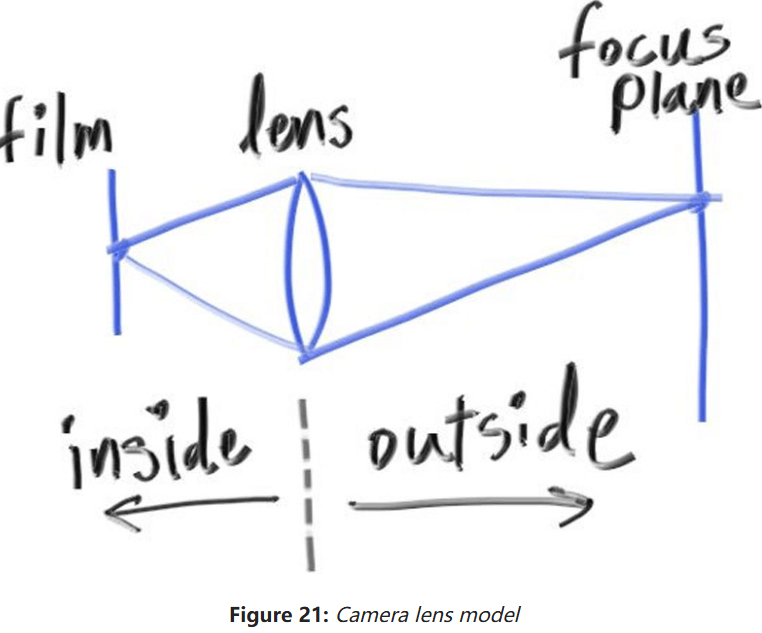
可以从无线薄的圆透镜发射光线,然后将它们发送到焦平面上的像素中,距离一个焦距,在焦平面上的图形是完全聚焦的。可以直接把视口放到焦平面上:
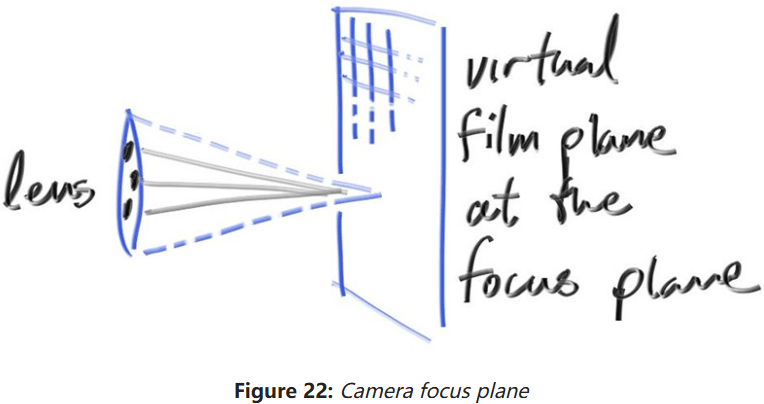
接下来捋捋思路:
- 焦平面和视口重叠
- 像素表格排列在视口内部
- 在当前像素区域,随机采样几个位置的图片
- 摄像机在透镜的随机位置发射光线,落到当前图片采样位置
随机生成采样光
没有散焦模糊,所有场景的光线都从摄像机的lookFrom发出。为了完成散焦模糊,我们需要创建一个以lookForm为中心的圆盘。圆盘的半径越大,散焦模糊的效果越强。可以认为我们之前的相机圆盘半径是0(没有散焦模糊)。
接下来在Vec3类中编写random_in_unit_disk(),以进行单位圆盘采样:
// 单位圆盘随机采样
inline Vec3 random_in_unit_disk()
{
while (true)
{
Vec3 p = Vec3(random_double(-1, 1), random_double(-1, 1), 0);
if (p.lengthSquared() < 1)
{
return p;
}
}
}然后更新Camera类实现散焦模糊:
class Camera
{
public:
double aspectRadio = 1.0; // 图像的宽高比
int imgWidth = 100; // 图像宽度
int samples_per_pixel = 10; // 每像素采样数, 即SPP
int max_depth = 10; // 光线的最大弹射次数
double vfov = 90; // 垂直fov
Point3 lookFrom = Point3(0, 0, 0); // 相机本体位置
Point3 lookAt = Point3(0, 0, -1); // 相机看向的位置
Vec3 vup = Vec3(0, 1, 0); // 指向相机正上方的单位向量
double defocus_angle = 0; // 光线通过每个像素的变化角度
double focus_dist = 10; // 焦距
...
private:
int imgHeight; // 图像高度
double pixel_sample_scale; // spp / 1
Point3 center; // 相机位置
Point3 pixel00_pos; // 像素(0, 0)的位置
Vec3 pixel_delta_u; // 定位像素用的辅助向量
Vec3 pixel_delta_v;
Vec3 u, v, w; // 相机空间的三个坐标轴
Vec3 defocus_disk_u; // 散焦模糊的水平和竖直半径
Vec3 defocus_disk_v;
void initialize()
{
imgHeight = static_cast<int>(imgWidth / aspectRadio);
imgHeight = (imgHeight < 1) ? 1 : imgHeight; // 确保高度至少为1
center = lookFrom;
pixel_sample_scale = 1.0 / samples_per_pixel;
// 视口设定
double theta = degrees_to_radians(vfov);
double h = std::tan(theta / 2);
double viewportHeight = 2 * h * focus_dist;
double viewportWidth = viewportHeight * static_cast<double>(imgWidth) / imgHeight;
// 相机坐标系初始化
w = unitVector(lookFrom - lookAt);
u = unitVector(cross(vup, w));
v = cross(w, u);
// 4个辅助向量
Vec3 viewport_u = viewportWidth * u;
Vec3 viewport_v = viewportHeight * -v;
pixel_delta_u = viewport_u / imgWidth;
pixel_delta_v = viewport_v / imgHeight;
// 计算第一个像素位置
Point3 viewport_upper_left = center - (focus_dist * w) - viewport_u / 2 - viewport_v / 2;
pixel00_pos = viewport_upper_left + 0.5 * (pixel_delta_u + pixel_delta_v);
// 计算散焦模糊的半径
double defocus_radius = focus_dist * std::tan(degrees_to_radians(defocus_angle / 2));
defocus_disk_u = u * defocus_radius;
defocus_disk_v = v * defocus_radius;
}
// 随机生成一条从摄像机原点为中心的圆盘出发, 到达像素(i,j)周围的光线
Ray get_ray(int i, int j) const
{
Vec3 offset = sample_square();
Point3 pixel_sample = pixel00_pos + ((i + offset.x()) * pixel_delta_u) + ((j + offset.y()) * pixel_delta_v);
Point3 ray_origin = (defocus_angle <= 0) ? center : defocus_disk_sample();
Vec3 ray_direction = pixel_sample - ray_origin;
return Ray(ray_origin, ray_direction);
}
Vec3 sample_square() const { ... }
// 返回圆盘的随机2d偏移量
Point3 defocus_disk_sample() const
{
Point3 p = random_in_unit_disk();
return center + (p[0] * defocus_disk_u) + (p[1] * defocus_disk_v);
}
Color ray_color(const Ray& r, int depth, const Hittable& world) const { ... }
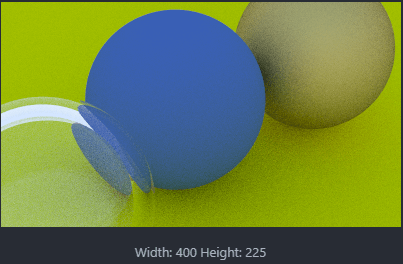
};使用大一点的圆盘透镜看看:
cam.defocus_angle = 10.0;
cam.focus_dist = 3.4;结果如下:
接下来干什么
最终的渲染器
接下来渲染一下本书的封面——许多随机的球:
int main() {
HittableList world;
auto ground_material = make_shared<Lambertian>(Color(0.5, 0.5, 0.5));
world.add(make_shared<Sphere>(Point3(0, -1000, 0), 1000, ground_material));
for (int a = -11; a < 11; a++) {
for (int b = -11; b < 11; b++) {
auto choose_mat = random_double();
Point3 center(a + 0.9 * random_double(), 0.2, b + 0.9 * random_double());
if ((center - Point3(4, 0.2, 0)).length() > 0.9) {
shared_ptr<Material> sphere_material;
if (choose_mat < 0.8) {
// diffuse
auto albedo = Color::random() * Color::random();
sphere_material = make_shared<Lambertian>(albedo);
world.add(make_shared<Sphere>(center, 0.2, sphere_material));
}
else if (choose_mat < 0.95) {
// metal
auto albedo = Color::random(0.5, 1);
auto fuzz = random_double(0, 0.5);
sphere_material = make_shared<Metal>(albedo, fuzz);
world.add(make_shared<Sphere>(center, 0.2, sphere_material));
}
else {
// glass
sphere_material = make_shared<Dielectric>(1.5);
world.add(make_shared<Sphere>(center, 0.2, sphere_material));
}
}
}
}
auto material1 = make_shared<Dielectric>(1.5);
world.add(make_shared<Sphere>(Point3(0, 1, 0), 1.0, material1));
auto material2 = make_shared<Lambertian>(Color(0.4, 0.2, 0.1));
world.add(make_shared<Sphere>(Point3(-4, 1, 0), 1.0, material2));
auto material3 = make_shared<Metal>(Color(0.7, 0.6, 0.5), 0.0);
world.add(make_shared<Sphere>(Point3(4, 1, 0), 1.0, material3));
Camera cam;
cam.aspectRadio = 16.0 / 9.0;
cam.imgWidth = 1200;
cam.samples_per_pixel = 500;
cam.max_depth = 50;
cam.vfov = 20;
cam.lookFrom= Point3(13, 2, 3);
cam.lookAt = Point3(0, 0, 0);
cam.vup = Vec3(0, 1, 0);
cam.defocus_angle = 0.6;
cam.focus_dist = 10.0;
cam.render(world);
}可能的结果如下(渲染了11小时还没渲染完,直接结束了):
实在等不行了,要想渲染完至少要差不多一天时间。待我看看视频研究研究多线程加速。
接下来的步骤
第二本书:下一周的光追
基于第一本书的光线追踪器继续开发,多了如下新特点:
- 动态模糊(Motion Blur),更真实地渲染移动物体;
- BVH(Bounding Volume Hierarchies),加速渲染复杂场景;
- 材质贴图,将图片贴在物体上;
- 柏林噪声,一个用于各种技术的随机噪声生成器;
- 四边形,是圆盘、三角形、环以及其他2D图元的基础;
- 变换,用于摆放和旋转物体;
- 体素渲染,渲染云、雾等大气;
第三本书:余生的光追
这本书拓展了第二本书的内容,基本上都是和提高渲染质量和性能有关,并且聚焦于生成正确的光线并近似地累计它们。适用于对专业级光追感兴趣的人,实现一些高级效果,例如次表面散射等。
其他方向
三角形:许多模型都由三角形组成,如何读写这些三角形很有挑战;
多线程:渲染一张图的速度太慢了,不妨试试多线程并行加速渲染;
阴影:当从光源发射光线时,可以决定一个点是如何渲染阴影。这样就能渲染软、硬阴影了。
![Shadow Ray]()
额外优化
多线程
实现自旋锁
首先自己实现一个自旋锁SpinLock和管理它的MyLockGuard类:
#pragma once
#include <atomic>
#include <thread>
class SpinLock
{
public:
void acquire()
{
while (flag.test_and_set(std::memory_order_acquire))
{
std::this_thread::yield();
}
}
void release()
{
flag.clear(std::memory_order_release);
}
private:
std::atomic_flag flag;
};
class MyLockGuard
{
public:
MyLockGuard(SpinLock& spin_lock) : spin_lock(spin_lock) { spin_lock.acquire(); }
~MyLockGuard() { spin_lock.release(); }
private:
SpinLock& spin_lock;
};实现简易线程池
然后实现一个简易线程池类ThreadPool,只有主线程main添加子任务是线程安全的,子线程添加子任务会出bug:
#pragma once
#include "spin_lock.hpp"
#include <vector>
#include <queue>
#include <thread>
#include <functional>
// 一个线程执行一个Task
class Task
{
public:
virtual void run() = 0;
};
// 并行For循环的任务
class ParallelForTask : public Task
{
public:
ParallelForTask(size_t x, size_t y, const std::function<void(size_t, size_t)>& lambda)
: x(x), y(y), lambda(lambda) {}
void run() override
{
lambda(x, y);
}
private:
size_t x, y;
std::function<void(size_t, size_t)> lambda;
};
class ThreadPool
{
public:
// 每个线程开始前执行的默认函数
static void WorkerThread(ThreadPool* master)
{
while (master->alive == 1)
{
Task* task = master->getTask();
if (task != nullptr)
{
task->run();
--master->pending_task_count;
}
else
{
// 当前线程“放弃”执行,让操作系统调度另一线程继续执行
std::this_thread::yield();
}
}
}
ThreadPool(size_t thread_count = 0)
{
alive = 1;
pending_task_count = 0;
// 如果为0, 就赋值成CPU线程数
if (thread_count == 0)
{
thread_count = std::thread::hardware_concurrency();
}
for (size_t i = 0; i < thread_count; ++i)
{
threads.push_back(std::thread(ThreadPool::WorkerThread, this));
}
}
~ThreadPool()
{
wait();
alive = 0;
for (auto& thread : threads)
{
thread.join();
}
threads.clear();
}
// 让Main线程等待所有子线程执行完毕
void wait() const
{
while (pending_task_count > 0)
{
std::this_thread::yield();
}
}
// 并行For循环
void parallelFor(size_t width, size_t height, const std::function<void(size_t, size_t)>& lambda)
{
MyLockGuard guard(spin_lock);
for (size_t x = 0; x < width; ++x)
{
for (size_t y = 0; y < height; ++y)
{
++pending_task_count;
tasks.push(new ParallelForTask(x, y, lambda));
}
}
}
// 为线程池添加任务
void addTask(Task* task)
{
// 保证同时只有一个线程添加任务
MyLockGuard guard(spin_lock);
++pending_task_count;
tasks.push(task);
}
// 为线程池获取任务
Task* getTask()
{
// 保证同时只有一个线程获取任务
MyLockGuard guard(spin_lock);
if (tasks.empty())
{
return nullptr;
}
Task* task = tasks.front();
tasks.pop();
return task;
}
private:
std::atomic<int> alive; // 线程池是否还存在
std::atomic<int> pending_task_count; // 正在/将要执行的任务数
std::vector<std::thread> threads;
std::queue<Task*> tasks;
SpinLock spin_lock;
};实现胶片类
还要新建一个胶片类Film,用于存储一张渲染好的图片:
#pragma once
#include "../rtweekend.h"
#include <fstream>
#include <filesystem>
#include <vector>
// 相机的胶片, 负责存储整个视口
class Film
{
public:
Film(size_t width, size_t height) : width(width), height(height)
{
pixels.resize(width * height);
}
// 存储PPM P6格式
void save(const std::filesystem::path& filename)
{
std::ofstream file(filename, std::ios::binary);
file << "P6\n" << width << ' ' << height << "\n255\n";
for (size_t y = 0; y < height; ++y)
{
for (size_t x = 0; x < width; ++x)
{
const Color& color = getPixel(x, y);
writeColor(file, color);
}
}
}
// Getter & Setters
size_t getWidth() const { return width; }
size_t getHeight() const { return height; }
Color getPixel(size_t x, size_t y) const { return pixels[y * width + x]; }
void setPixel(size_t x, size_t y, const Color& color) { pixels[y * width + x] = color; }
private:
size_t width, height;
std::vector<Color> pixels;
};这里使用PPM P6格式存储图片,和PPM P3格式相比,它省去了空格和换行符,使用二进制存储,节省了一定的空间和时间。
最后修改一下相机类Camara,让其适配线程池和胶片:
void render(const Hittable& world)
{
initialize();
ThreadPool thread_pool;
Film film(imgWidth, imgHeight);
thread_pool.parallelFor(film.getWidth(), film.getHeight(), [&](size_t x, size_t y)
{
Color final_pixel_color(0, 0, 0);
for (int sampleCnt = 0; sampleCnt < samples_per_pixel; ++sampleCnt)
{
Ray r = get_ray(x, y);
final_pixel_color += ray_color(r, max_depth, world);
}
film.setPixel(x, y, pixel_sample_scale * final_pixel_color);
});
thread_pool.wait();
film.save("filmTest.ppm");
}最终结果如下,渲染只需3小时左右,效率大大提升:
继续优化
实际上,这个并行for循环还能进行优化。由于上面的方法是给每一个线程分配一个像素,导致有的线程递归多,有的少,出现负载不平衡,从而影响整体渲染效率。
可以使用 动态任务分配 的方法,避免线程因某些像素递归过多而负载过高。可以将场景中的像素分成小块,每个线程动态领取任务块,而不是提前固定分配给每个线程。
修改后的parallelFor()如下:
// 并行For循环的任务
class ParallelForTask : public Task
{
public:
ParallelForTask(size_t x, size_t y, size_t chunk_width, size_t chunk_height, const std::function<void(size_t, size_t)>& lambda)
: x(x), y(y), chunk_width(chunk_width), chunk_height(chunk_height), lambda(lambda) {}
void run() override
{
for (size_t offset_x = 0; offset_x < chunk_width; ++offset_x)
{
for (size_t offset_y = 0; offset_y < chunk_height; ++offset_y)
{
lambda(x + offset_x, y + offset_y);
}
}
}
private:
size_t x, y, chunk_width, chunk_height;
std::function<void(size_t, size_t)> lambda;
};
// 并行For循环
void parallelFor(size_t width, size_t height, const std::function<void(size_t, size_t)>& lambda)
{
MyLockGuard guard(spin_lock);
// 计算区块宽高
double chunk_width_f = static_cast<double>(width) / std::sqrt(16) / std::sqrt(threads.size());
double chunk_height_f = static_cast<double>(height) / std::sqrt(16) / std::sqrt(threads.size());
size_t chunk_width = std::ceil(chunk_width_f);
size_t chunk_height = std::ceil(chunk_height_f);
for (size_t x = 0; x < width; x += chunk_width)
{
for (size_t y = 0; y < height; y += chunk_height)
{
++pending_task_count;
if (x + chunk_width > width) chunk_width = width - x;
if (y + chunk_height > height) chunk_height = height - y;
tasks.push(new ParallelForTask(x, y, chunk_width, chunk_height, lambda));
}
}
}模型渲染
只有球还是太枯燥了,接下来看看模型是如何渲染的。
三角形的数学定义
模型是由三角形组成的,三角形的数学定义如下:
- 三个顶点V1,V2,V3
- 每个顶点包括:位置
,法线方向 。
光线和三角形相交
详见Games101中Whitted-Style 光线追踪部分。使用Moller Trumbore算法,将三角形用重心坐标表示,并和光线方程联立,最后用克莱姆法则求解线性方程组:
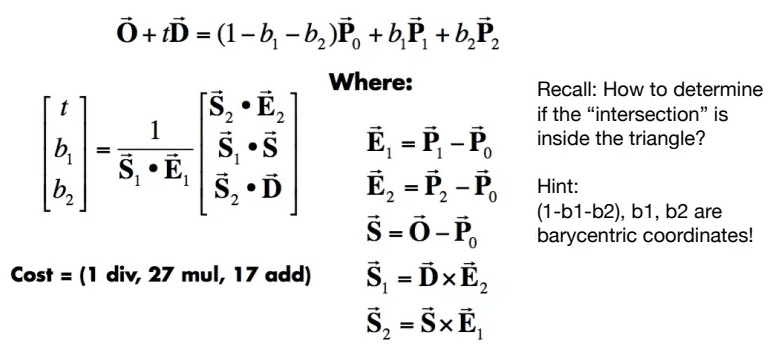
其中
代码实现
定义三角形类Triangle如下:
#pragma once
#include "../ray/hittable.hpp"
class Triangle : public Hittable
{
public:
Triangle(const Point3& p0, const Point3& p1, const Point3& p2,
const Vec3& n0, const Vec3& n1, const Vec3& n2,
shared_ptr<Material> material)
: p0(p0), p1(p1), p2(p2), n0(n0), n1(n1), n2(n2), material(material) {}
Triangle(const Point3& p0, const Point3& p1, const Point3& p2,
shared_ptr<Material> material)
: p0(p0), p1(p1), p2(p2), material(material)
{
Vec3 e1 = p1 - p0;
Vec3 e2 = p2 - p0;
Vec3 normal = unitVector(cross(e1, e2));
n0 = normal;
n1 = normal;
n2 = normal;
}
bool hit(const Ray& r, Interval ray_t, HitRecord& rec) const override
{
// 使用MT法判光线和三角形面相交
Vec3 e1 = p1 - p0;
Vec3 e2 = p2 - p0;
Vec3 s1 = cross(r.direction(), e2);
double inv_det = 1.0 / dot(s1, e1);
Vec3 s = r.origin() - p0;
double u = dot(s1, s) * inv_det;
if (u < 0 || u > 1) { return false; }
Vec3 s2 = cross(s, e1);
double v = dot(s2, r.direction()) * inv_det;
if (v < 0 || u + v > 1) { return false; }
double hit_t = dot(s2, e2) * inv_det;
if (ray_t.surrounds(hit_t))
{
// 将三顶点法线进行插值
Vec3 normal = (1.0 - u - v) * n0 + u * n1 + v * n2;
// 记录相交信息
rec.t = hit_t;
rec.position = r.at(hit_t);
rec.normal = unitVector(normal);
// rec.set_face_normal(r, unitVector(normal));
rec.material = material;
return true;
}
return false;
}
private:
Point3 p0, p1, p2; // 三角形的顶点位置信息
Vec3 n0, n1, n2; // 三角形的顶点法线信息
shared_ptr<Material> material;
};在三角形类中,
然后定义模型类Model如下:
#pragma once
#include "triangle.hpp"
#include <vector>
#include <filesystem>
#include <fstream>
#include <sstream>
class Model : public Hittable
{
public:
Model(const std::vector<Triangle>& triangles, shared_ptr<Material> material)
: triangles(triangles), material(material) {}
Model(const std::filesystem::path& filename, shared_ptr<Material> material)
: material(material)
{
// obj格式文件
// 顶点: v 1 2 3
// 法向量: vn 1 2 3
// 三角形: f p0//n0 p1//n1 p2//n2
std::vector<Point3> positions;
std::vector<Vec3> normals;
std::ifstream file(filename);
if (!file.good())
{
std::cout << "打开文件 " << filename << " 失败!\n";
return;
}
std::string line;
char trash;
while (!file.eof())
{
std::getline(file, line);
std::istringstream iss(line);
// 读取顶点
if (line.compare(0, 2, "v ") == 0)
{
Point3 pos;
iss >> trash >> pos.e[0] >> pos.e[1] >> pos.e[2];
positions.push_back(pos);
}
// 读取法向量
else if (line.compare(0, 3, "vn ") == 0)
{
Vec3 normal;
iss >> trash >> trash >> normal.e[0] >> normal.e[1] >> normal.e[2];
normals.push_back(normal);
}
// 读取三角形
else if (line.compare(0, 2, "f ") == 0)
{
int p0, p1, p2, n0, n1, n2;
iss >> trash;
iss >> p0 >> trash >> trash >> n0;
iss >> p1 >> trash >> trash >> n1;
iss >> p2 >> trash >> trash >> n2;
triangles.push_back(Triangle(
positions[p0 - 1], positions[p1 - 1], positions[p2 - 1],
normals[n0 - 1], normals[n1 - 1], normals[n2 - 1],
material
));
}
}
}
bool hit(const Ray& r, Interval ray_t, HitRecord& rec) const override
{
bool isHit = false;
for (const auto& triangle : triangles)
{
HitRecord tri_rec;
if (triangle.hit(r, ray_t, tri_rec))
{
isHit = true;
ray_t.max = tri_rec.t;
rec = tri_rec;
}
}
return isHit;
}
private:
std::vector<Triangle> triangles;
shared_ptr<Material> material;
};最后修改main函数:
// 材质设定
auto material_center = make_shared<Lambertian>(Color(0.1, 0.2, 0.5));
// 场景设定
HittableList world;
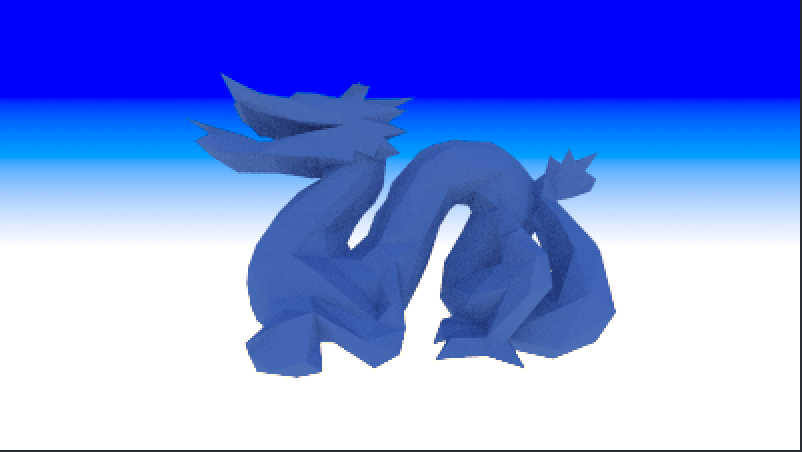
world.add(make_shared<Model>("models/simple_dragon.obj", material_center));
// 初始化摄像机, 然后渲染
Camera cam;
cam.aspectRadio = 16.0 / 9.0;
cam.imgWidth = 400;
cam.samples_per_pixel = 100;
cam.max_depth = 50;
cam.vfov = 90;
cam.lookFrom = Point3(-0.6, 0, 0);
cam.lookAt = Point3(0, 0, 0);
cam.vup = Vec3(0, 1, 0);
cam.render(world);最终效果如下:
参考资料
- Ray Tracing in One Weekend
- 从0开始的光追渲染器 HeaoYe B站